

Robot end dexterous underactuated bionic gripper
A robot, underactuated technology, applied in the field of robotics, can solve the problems of complex control strategy, inability to meet the development trend of robot tool flexibility, poor grasping accuracy and adaptive ability, etc., and achieve broad scientific research and application prospects, structure Compact, flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below, the technical solution of the present invention will be described in detail through specific examples.
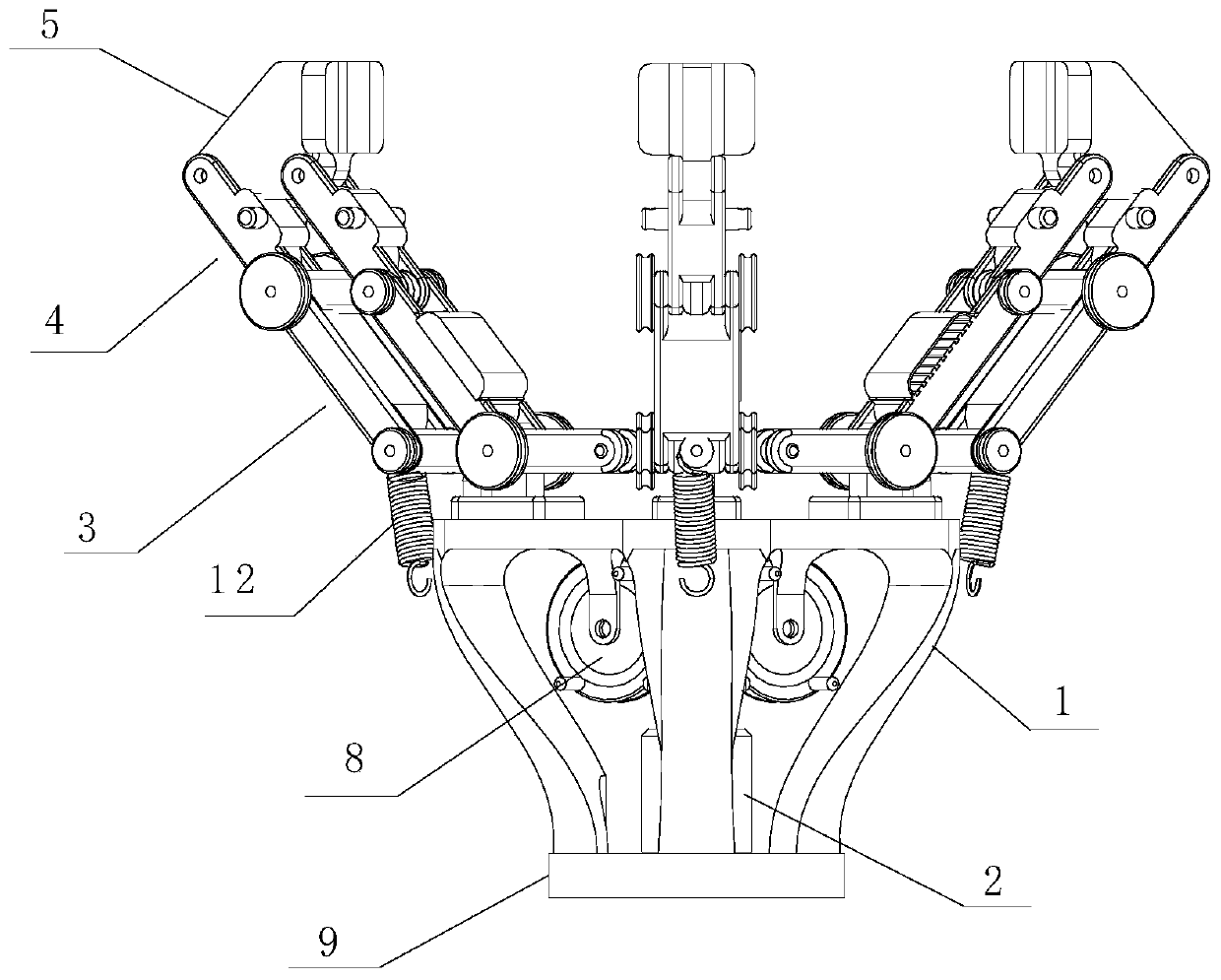
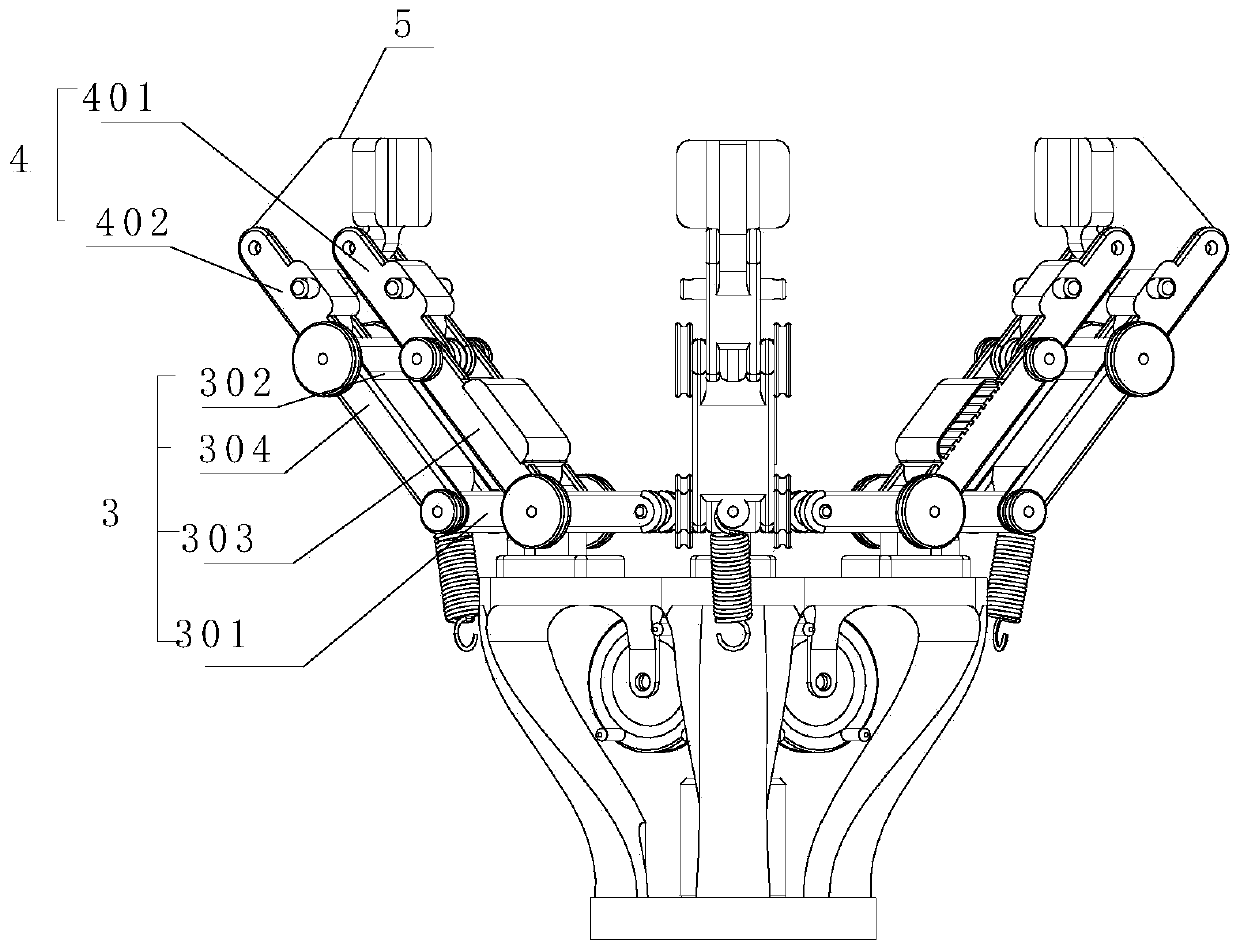
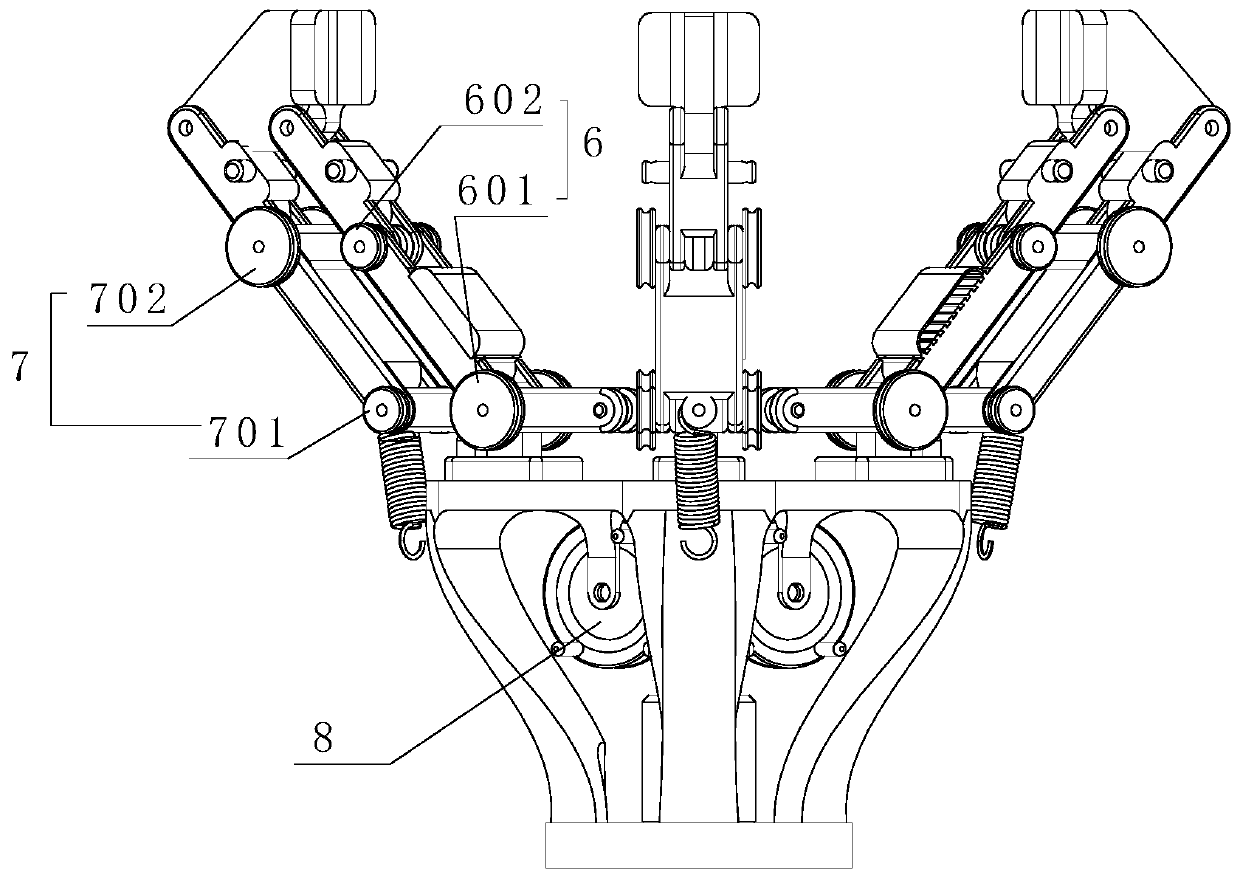
[0032] Such as Figure 1-8 as shown, figure 1 Schematic diagram of the structure of a dexterous underactuated bionic gripper at the end of the robot proposed for the invention; figure 2 Schematic diagram of the structure of the bionic finger in a dexterous underactuated bionic gripper at the end of the robot proposed for the invention; image 3 A schematic diagram of the installation of the first pulley block and the second pulley block in a smart underactuated bionic gripper at the end of a robot proposed for the invention; Figure 4 Schematic diagram of the structure of the imitated flexor-extensor cable and the imitated extensor cable in a dexterous underactuated bionic gripper at the end of the robot proposed for the invention; Figure 5 A schematic diagram of the winding of the imitated flexor-extensor cable and the imitated extensor cable in a smart ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More