

Lower limb exoskeleton walking track tracking method controlled by inherited iterative learning
An iterative learning control and trajectory tracking technology, which is applied in the direction of program control of manipulators, manufacturing tools, and appliances that help people walk, can solve the problem of not considering the difference in expected trajectory, that is, the change of expected trajectory, the walking of the lower limb exoskeleton is not completely fixed, the lower limb exoskeleton, etc. The bones are not well adapted to the effect and other problems, to achieve the effect of fast and effective tracking, shortening the control time, and reducing the number of learning times
Active Publication Date: 2020-08-11
HEBEI UNIV OF TECH
View PDF8 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] At present, the iterative learning control of the lower extremity exoskeleton is controlled from a single specific trajectory, that is, only a specific desired trajectory can be input for tracking
However, in different periods of motion in the same motion mode, the walking of the lower extremity exoskeleton is not completely fixed
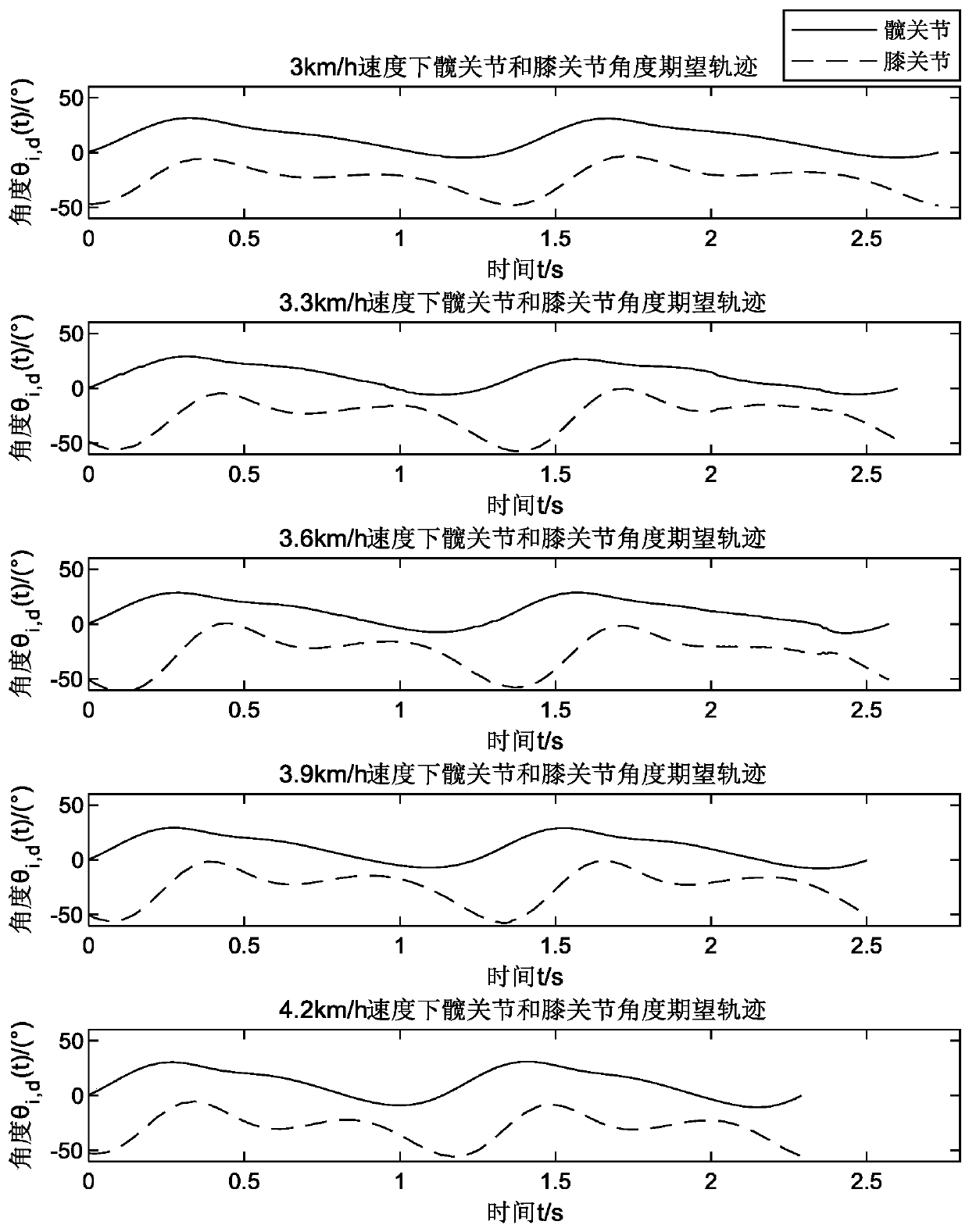
The document with application number 201910396222.2 discloses a single-leg cooperative control method for exoskeleton based on adaptive iterative learning, which uses iterative learning control to control the lower extremity exoskeleton, but the expected trajectory used is the same expected trajectory, and does not consider In different periodic motions under the same gait motion mode, the expected trajectory of the hip joint and knee joint angle is different due to the change of the pace, that is, the expected trajectory change problem
The traditional iterative learning control of the lower extremity exoskeleton robot can only solve the iterative problem by re-learning, and cannot directly track quickly through the angle change at different speeds
Therefore, traditional iterative learning control does not have a good adaptation effect on lower extremity exoskeletons
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0049] The first gait cycle (i=1) of the lower extremity exoskeleton robot walks at a speed of 3.6km / h, then extract the corresponding angle expected trajectory θ at the speed of v(1)=3.6km / h from the trajectory library 1,d (t). Set the initial control torque of the first gait cycle to zero initial state T 1,0 (t)=0.
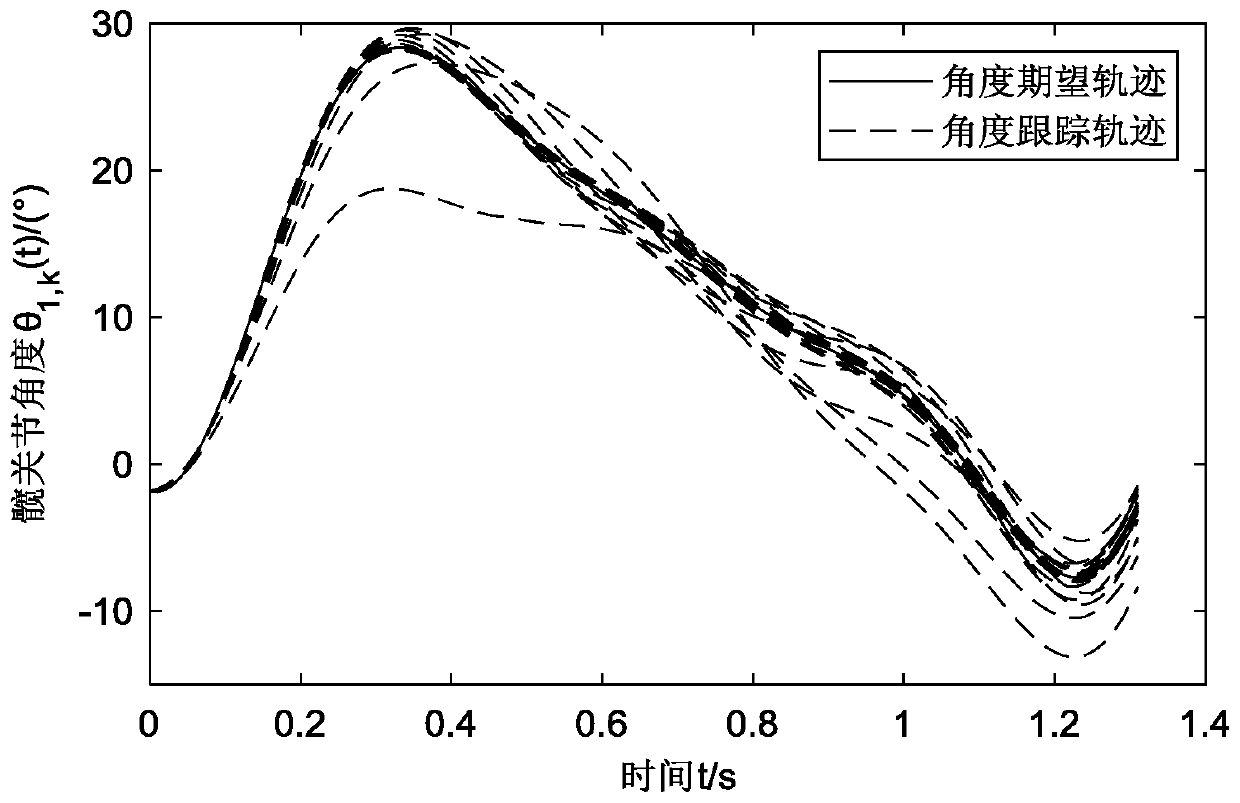
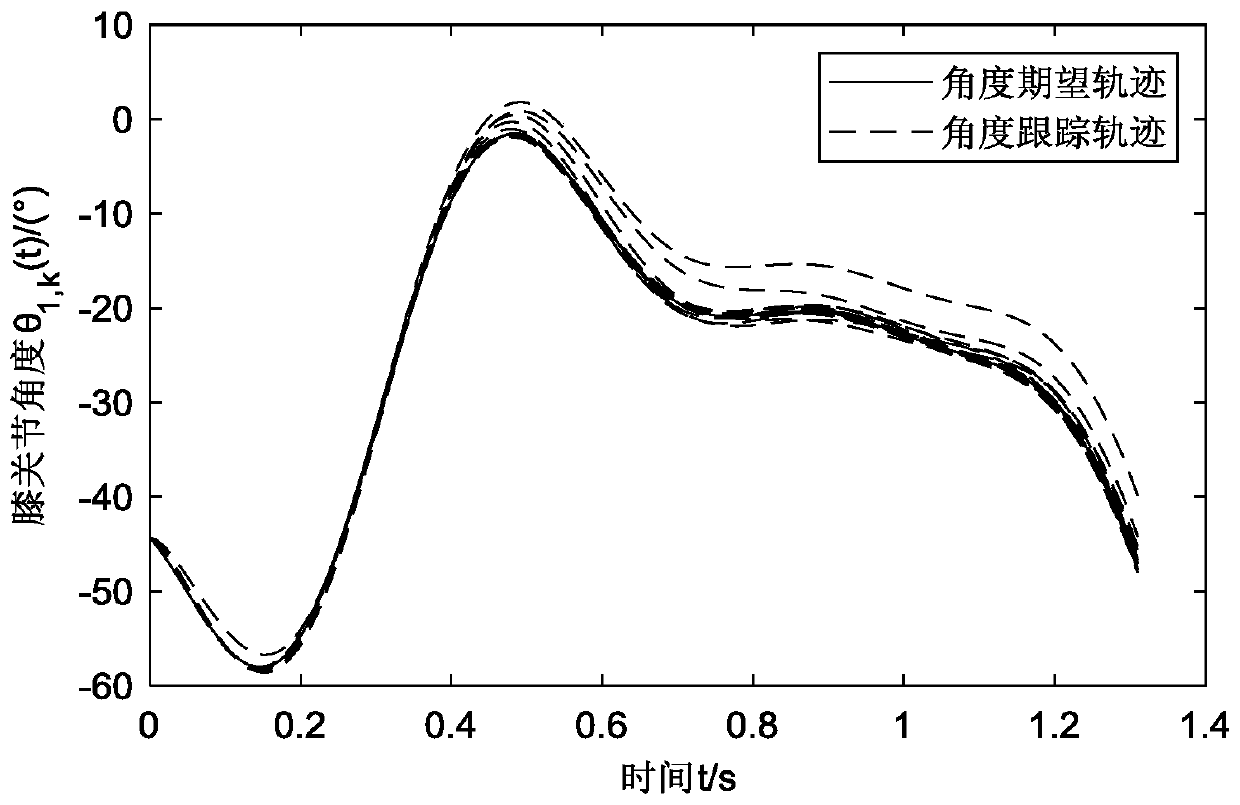
[0050] Considering the convergence rate and convergence precision in the iterative process, PID type iterative learning control is adopted. Set the learning law of iterative learning control, the L, Ψ and Γ of the hip joint are 0.8, 0 and 80, respectively, and the L, Ψ and Γ of the knee joint are 0.3, 0 and 50, respectively.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a lower limb exoskeleton walking track tracking method controlled by inherited iterative learning. The method includes the steps that a lower limb exoskeleton model is adoptedas a controlled object, a track library corresponding to lower limb exoskeleton step speeds is established, a lower limb exoskeleton inherited iterative learning control method is designed, and tracksat different step speeds are controlled. According to the method, data of hip joints and knee joints at the different step speeds are used as expected tracks tracked by a system, and the inherited iterative learning control method can be used; and the connection between gait periods of the different step speeds is achieved through an inheritance formula, iterative learning control information atthe former step speed is effectively used as initial information at the current new step speed, the different angle expected tracks can be rapidly and effectively tracked without repeated learning, the problem of re-learning at new step speeds is avoided, the learning frequency is reduced, the control time is shortened, the convergence requirement is rapidly met, and the convergence speed is higher than the convergence speed of re-learning.
Description
technical field [0001] The invention belongs to the field of exoskeleton robot control, in particular to a lower limb exoskeleton walking trajectory tracking method for inheritance iterative learning control. Background technique [0002] The lower extremity exoskeleton robot is a device that combines human motion and machine motion. It completes various motion modes through the guidance of the human body, improves the walking speed of the human body and relieves the fatigue of the human body. The control problem has always been a problem for the majority of researchers. research hotspots. The control of the exoskeleton robot mainly includes controlling the angle changes of the hip and knee joints of the lower extremity exoskeleton. Desired trajectory of the knee joint angle. Iterative learning control (ILC) is a control method suitable for the controlled object with repetitive motion, and it can be controlled quickly. The lower extremity exoskeleton robot is the controll...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J9/00B25J9/16A61H3/00
CPCB25J9/0006B25J9/163A61H3/00A61H2201/5058A61H2201/5069A61H2201/1659
Inventor胡冬刘作军刘磊刘少哲陈玲玲张燕
OwnerHEBEI UNIV OF TECH