

Obstacle-crossing inspection robot and obstacle-crossing method
A technology for inspecting robots and obstacles, which is applied in the field of robotics, can solve the problems that wheeled robots cannot pass through, and achieve the effect of improving obstacle-crossing efficiency and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical problems solved by the present invention, the technical solutions adopted and the technical effects achieved clearer, the technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
[0029] In order to facilitate the description of this scheme, taking the forward direction of the obstacle-crossing inspection robot as a reference, the side facing the forward direction is the front side, and the side opposite to the front side is the rear side, and the front side and the rear side are corresponding left and right sides of .
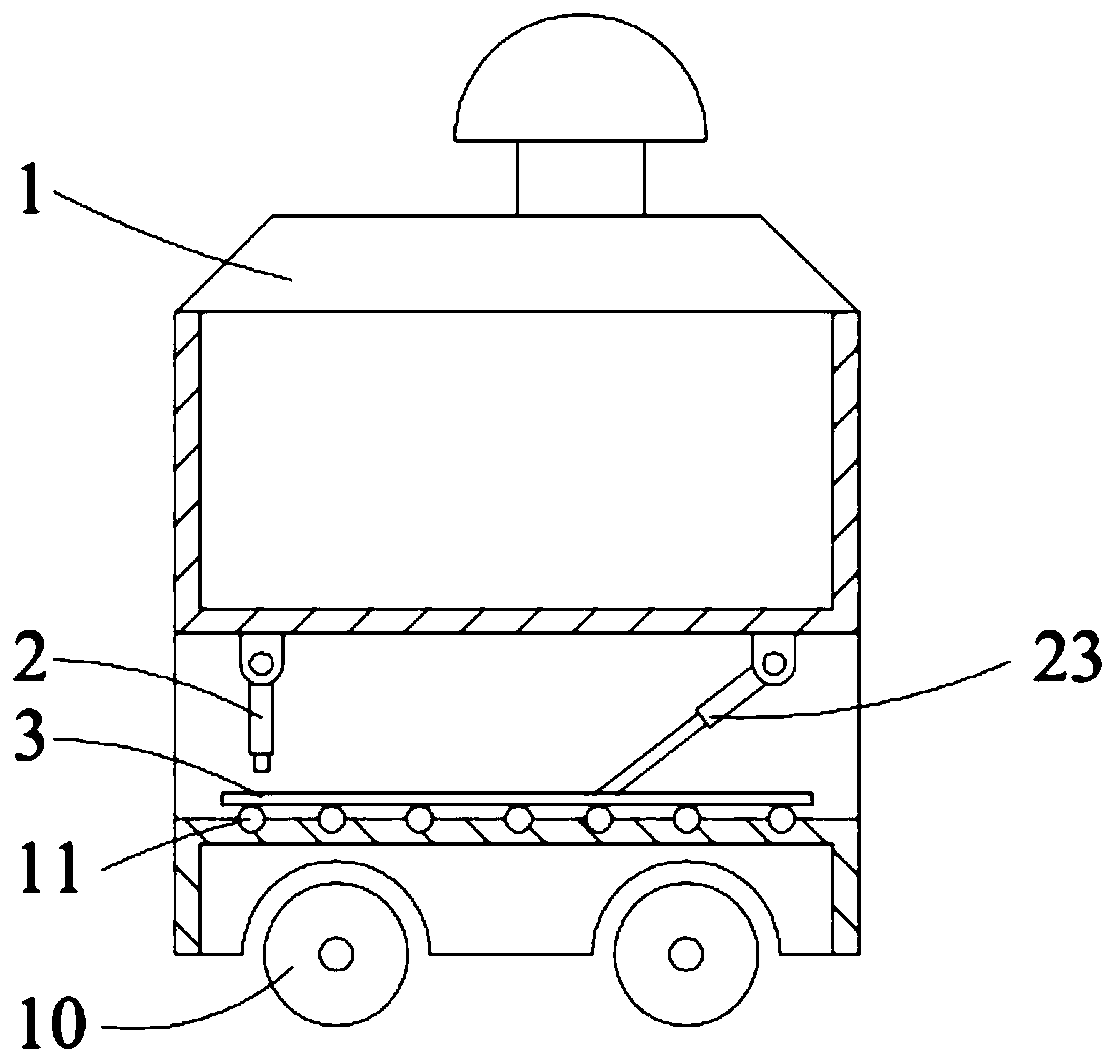
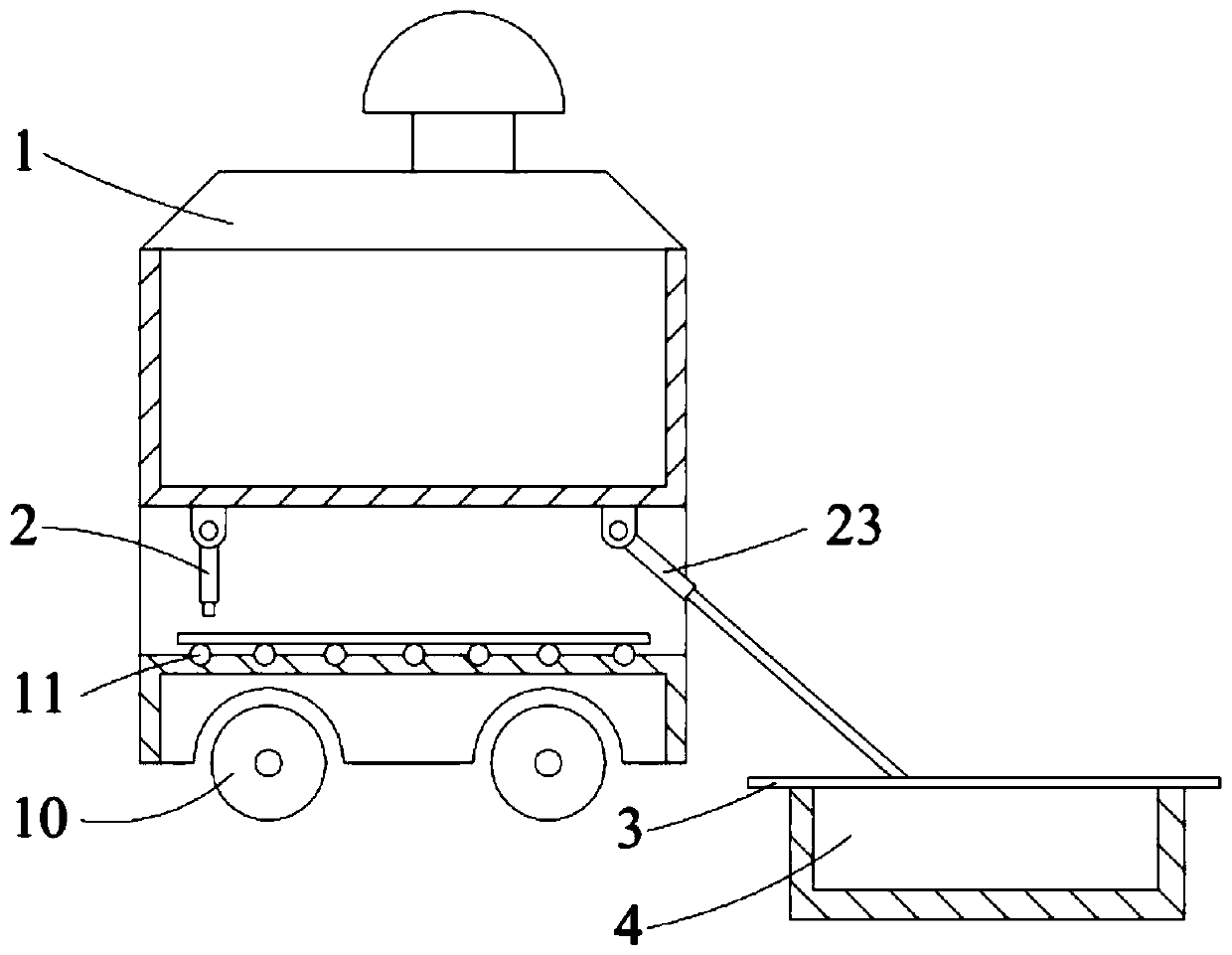
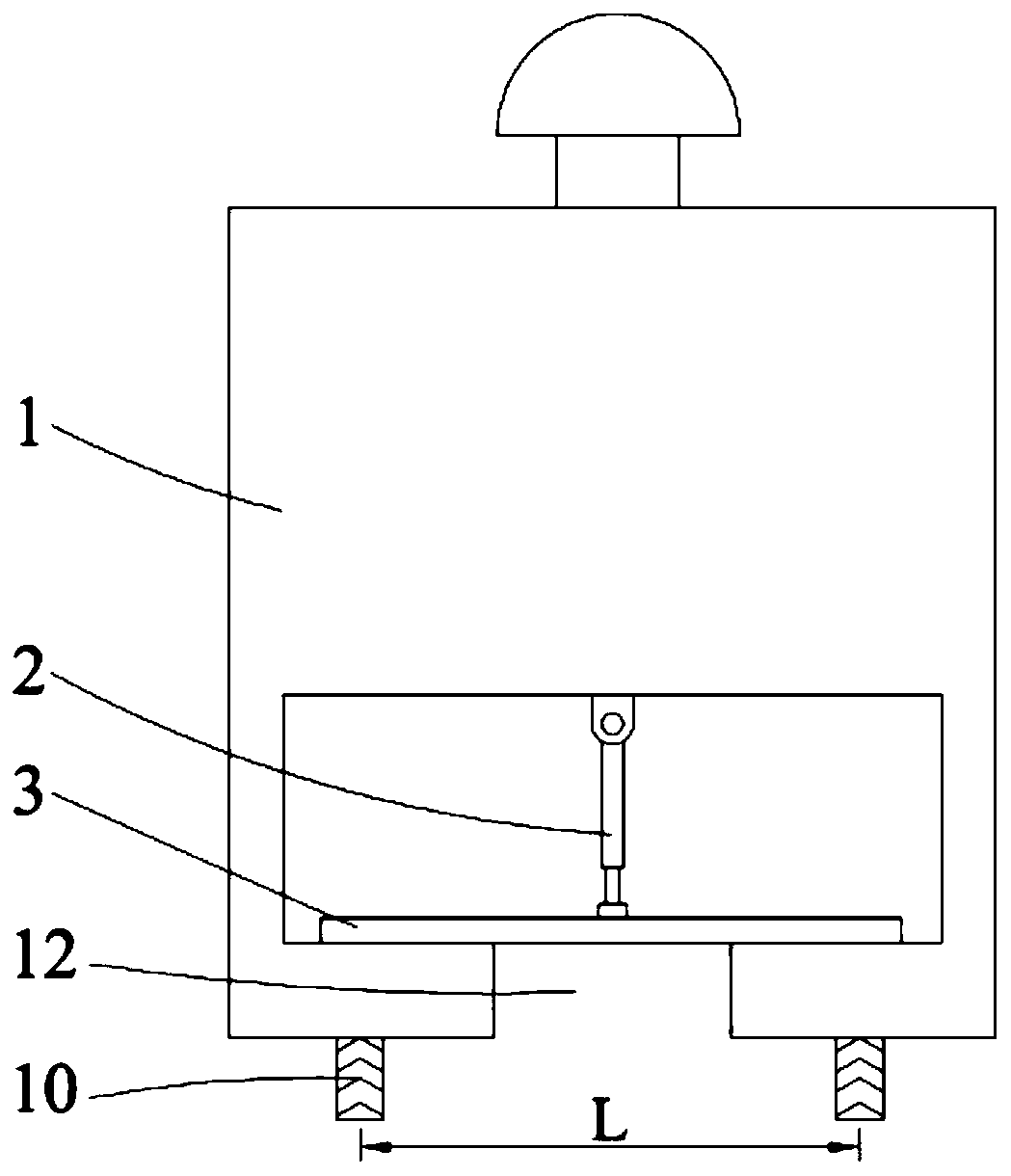
[0030] Such as Figure 1 to Figure 4 As shown, an obstacle-crossing inspection robot provided by the present invention includes a car body 1 and wheels 10 arranged on the left and right sides of the car body 1. There are a bridge plate 3 and a manipulator 2, the manipulator 2 can transfer the bridge plate 3 from...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More