Multi-AGV real-time scheduling method based on step length
A real-time scheduling and step-length technology, applied in instruments, data processing applications, forecasting, etc., can solve problems such as paralysis of the logistics warehouse system, and achieve the effect of reducing scheduling waiting time, improving work efficiency, scheduling sequence and process optimization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
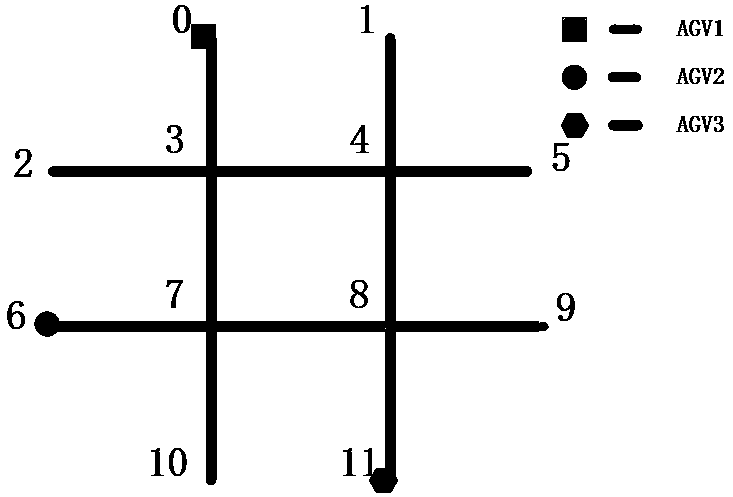
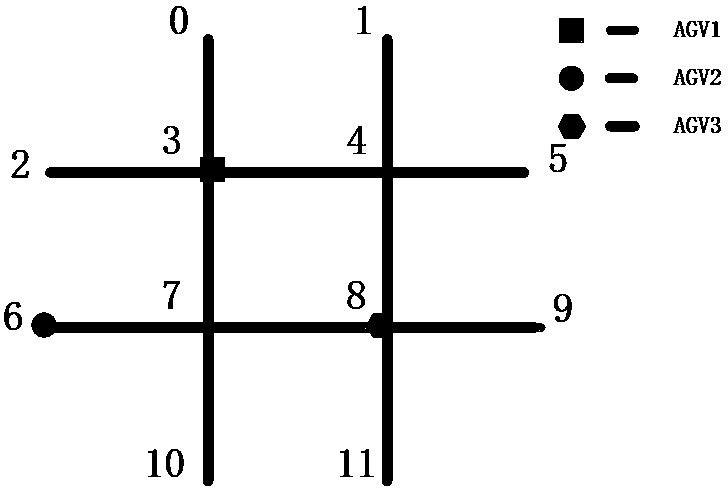
[0040] In this implementation, the AGV1 scheduling path sequence is (0, 3, 7, 8, 9), the AGV2 scheduling path sequence is (6, 7, 3, 2), and the AGV3 scheduling path sequence is (11, 8, 9). The corresponding path of each AGV car is as follows figure 1As shown, initialize the postion attribute of each AGV car to 0, indicating that the car is at the initial site position, set the colSite attribute to the sequence length, and enter the scheduling calculation, because the 3->7 in AGV1 and the 7->3 position in AGV2 There is a conflict, but there is no conflict between AGV3 and AGV1 and AGV2, so it is necessary to let AGV2 wait for the 7 and 3 sites to be unlocked at the 7->3 position of AGV2, and then complete the dispatch of all 3 vehicles. The initial state of the dispatch system is as follows figure 2 shown.
[0041] Then start scheduling.
[0042] 1. Start the first scheduling, sort the cars according to the remaining sequence length, the current priority order is AGV1>AGV2>A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More