

Underwater autonomous vehicle docking method based on deconvolution algorithm
An autonomous vehicle, deconvolution technology, applied in instruments, water resource assessment, re-radiation of sound waves, etc., can solve the problem of limited use range, and achieve the effect of high resolution, high gain, and extended detection range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings.
[0041] refer to Figure 1 to Figure 5 , the steps of a method for docking an underwater autonomous vehicle based on a deconvolution algorithm are as follows:
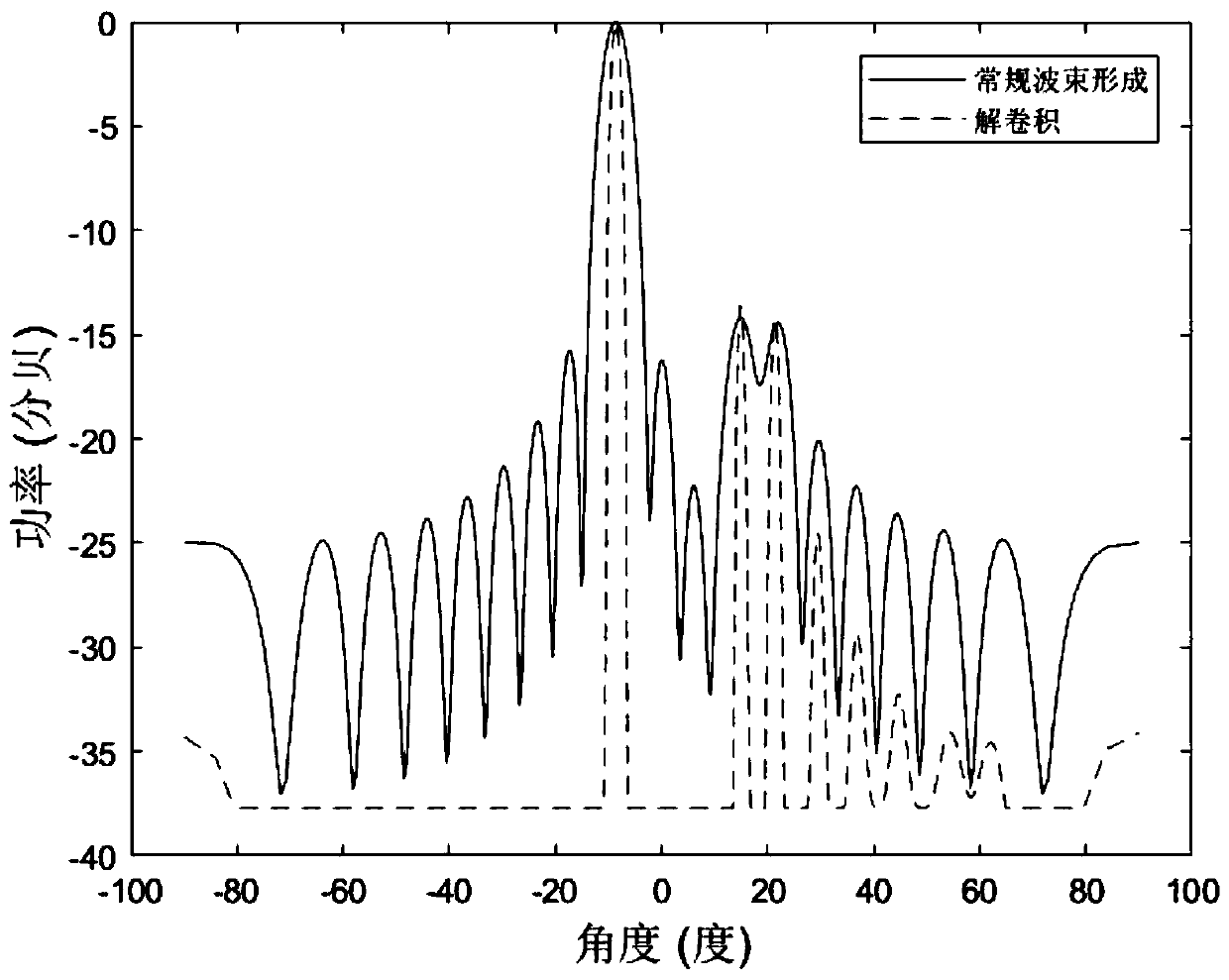
[0042] (1) Sound source position search and positioning: When the underwater autonomous vehicle is moving or hovering, the received signal of the horizontal hydrophone in the planar hydrophone array is processed by the conventional beamforming algorithm to obtain the spatial power spectrum p(φ x ), the original sound source distribution s(φ x ), get the azimuth φ of the sound source relative to the underwater autonomous vehicle in the horizontal direction xd ; among them, φ x is the azimuth angle variable:
[0043] (1.1) Assume that the received sound pressure signal at a certain moment is x=[x 1 ,x 2 ,x 3 ,...,x M ] H , where x m is the received sound pressure signal of the mth (m=1,2,...,M) hydrophon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More