

Man-machine hybrid intelligent cooperative vehicle following control method for keeping driver in loop
A control method and driver's technology, applied in the field of driver-in-the-loop human-machine co-driving control, can solve problems such as high attention level, expensive sensors, and driver distress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
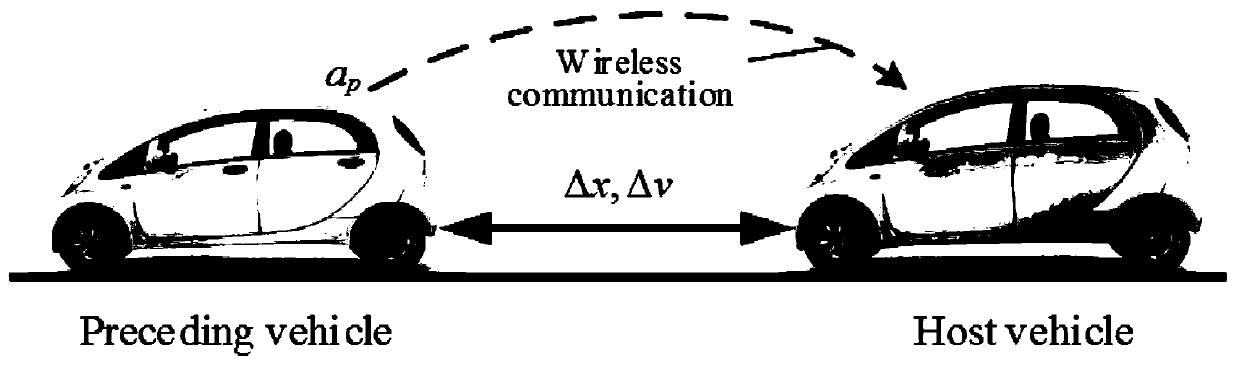
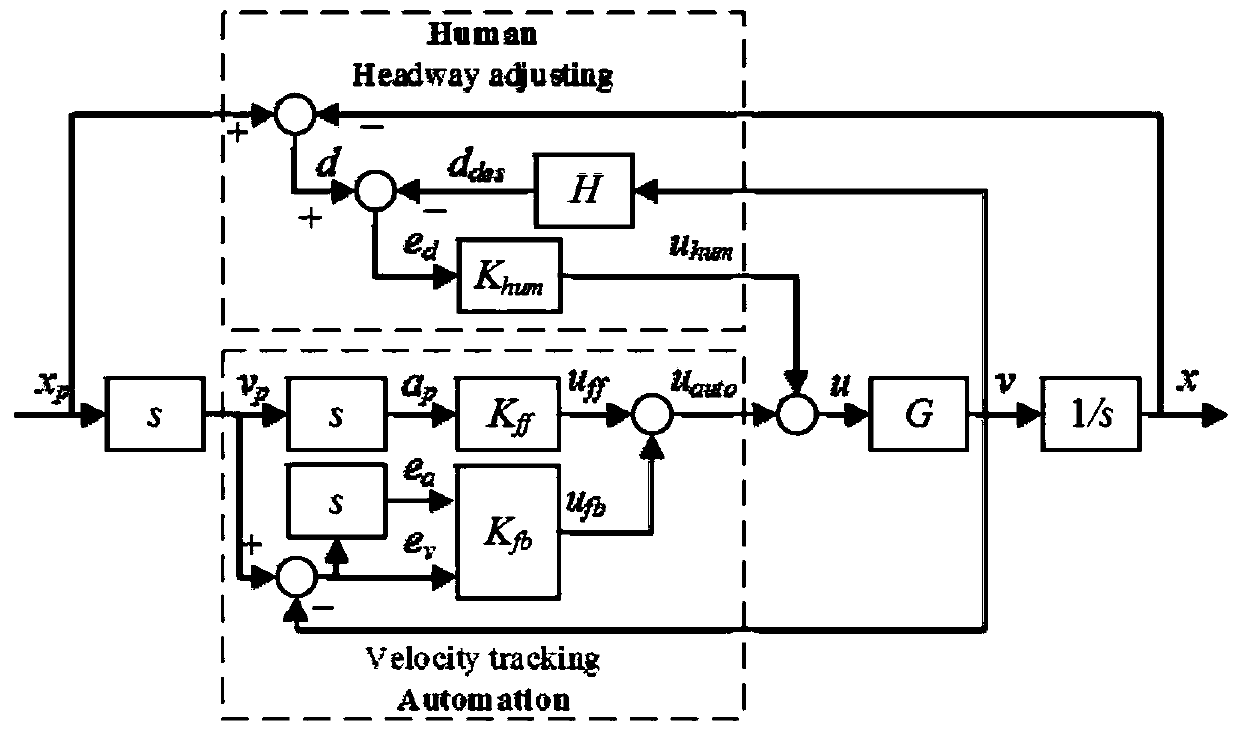
[0101] Such as Figure 1-2 A human-machine hybrid intelligent collaborative car following control method for keeping the driver in the loop is shown, comprising the following steps:
[0102] Step 1: Define the configuration, follow-up tasks and scenarios of the autonomous driving vehicle
[0103] The self-driving car is equipped with high-precision actuators and sensors. The front car and the main car are in the same lane, and the following self-driving car can obtain real-time acceleration information of the front car through wireless communication. p ; At the same time, the self-driving vehicle obtains the relative inter-vehicle distance Δx and the relative vehicle speed Δv between the two vehicles through the sensor;
[0104] Step 2: Construct vehicle longitudinal dynamics model
[0105] Considering the influence of factors such as vehicle inertia, engine torque, air resistance and ground friction, construct the vehicle longitudinal speed v(t), acceleration a(t), and jerk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More