

Work information obtaining method and device based on image recognition and storage medium
A work information and image recognition technology, applied in the field of robotics, can solve the problems of not being able to perceive the working status of the pickers, the number of goods to be picked, and too many arrangements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
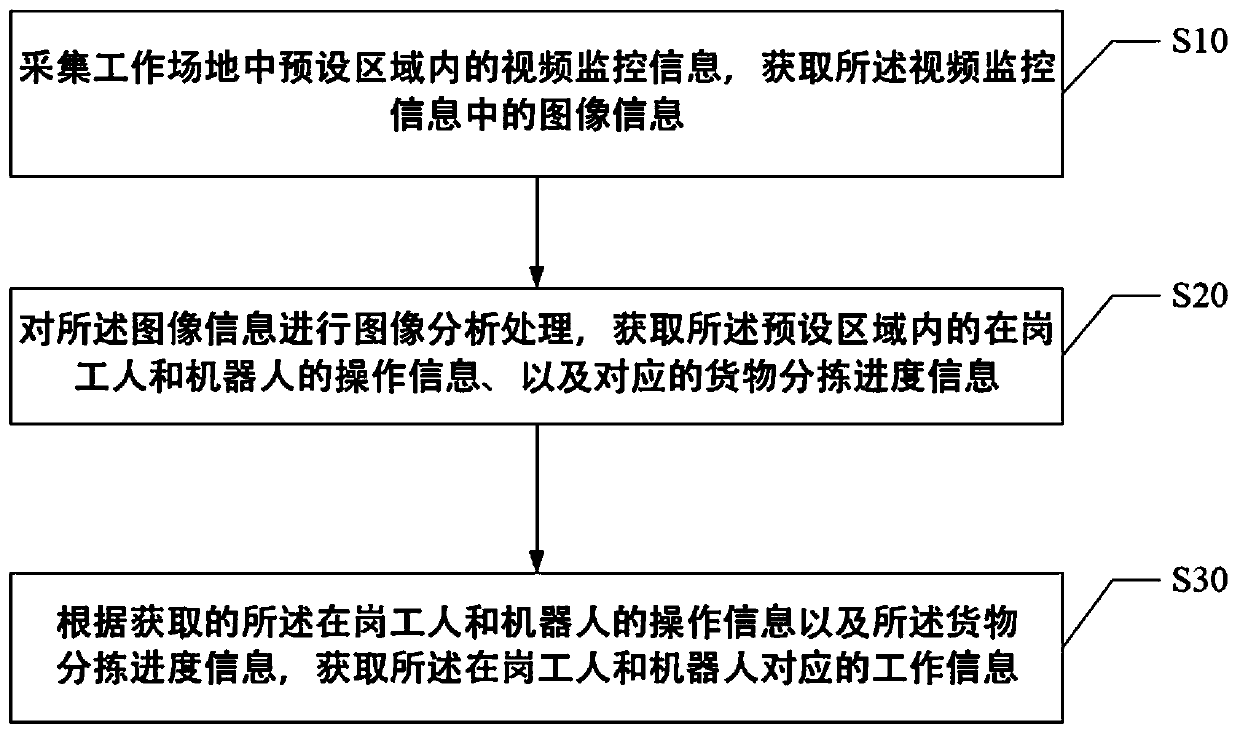
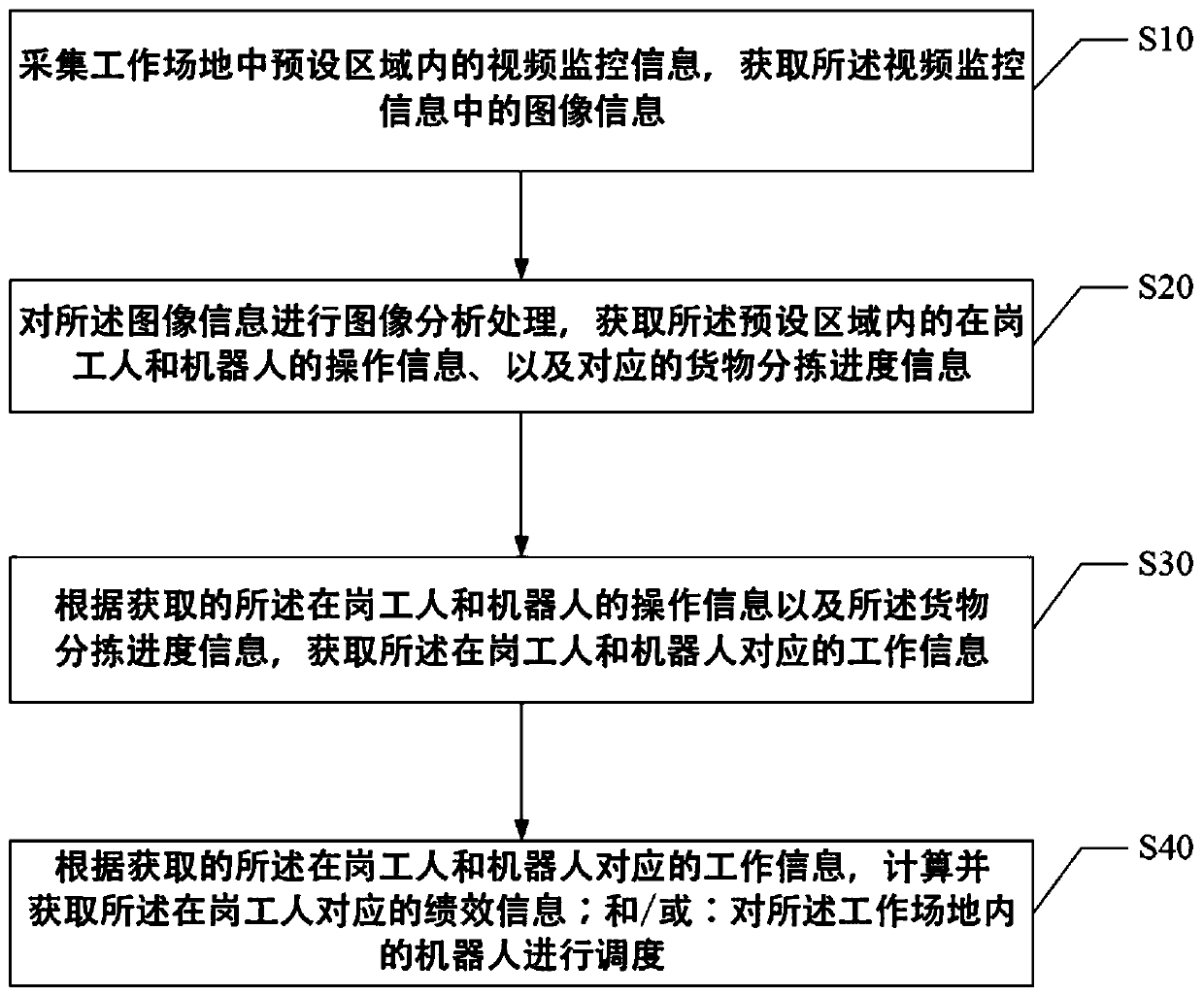
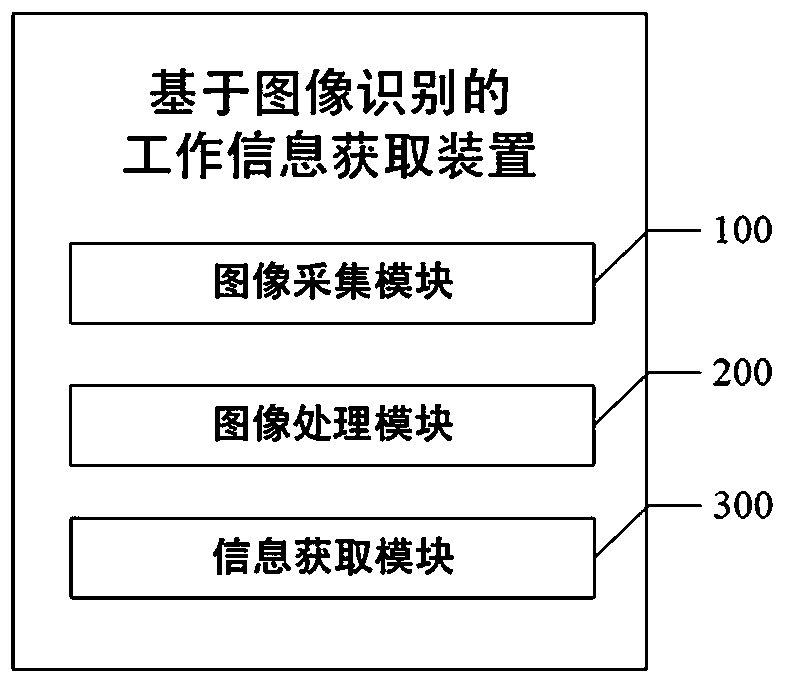
[0022] The present invention provides a work information acquisition method, device and storage medium based on image recognition, which are used to obtain the information of the picker through image recognition without adding an additional transceiver to the robot or wearing a transceiver for the picker. The work information of the on-the-job workers at the cargo station when picking goods can avoid changing the original data calculation and data identification processing methods of the robot, and reduce the amount of calculation and cost of the robot.
[0023] Furthermore, it is also possible to coordinate the transportation robots based on the work information of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More