

Four-wheel independent steering robot chassis
A four-wheel independent steering, robot technology, applied in the steering mechanism, steering rod, substructure and other directions, can solve the problems of chassis dumping, insufficient obstacle avoidance ability of the chassis, shortened service life of wheels, etc., to achieve fast moving speed, compact structure, smooth motion effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
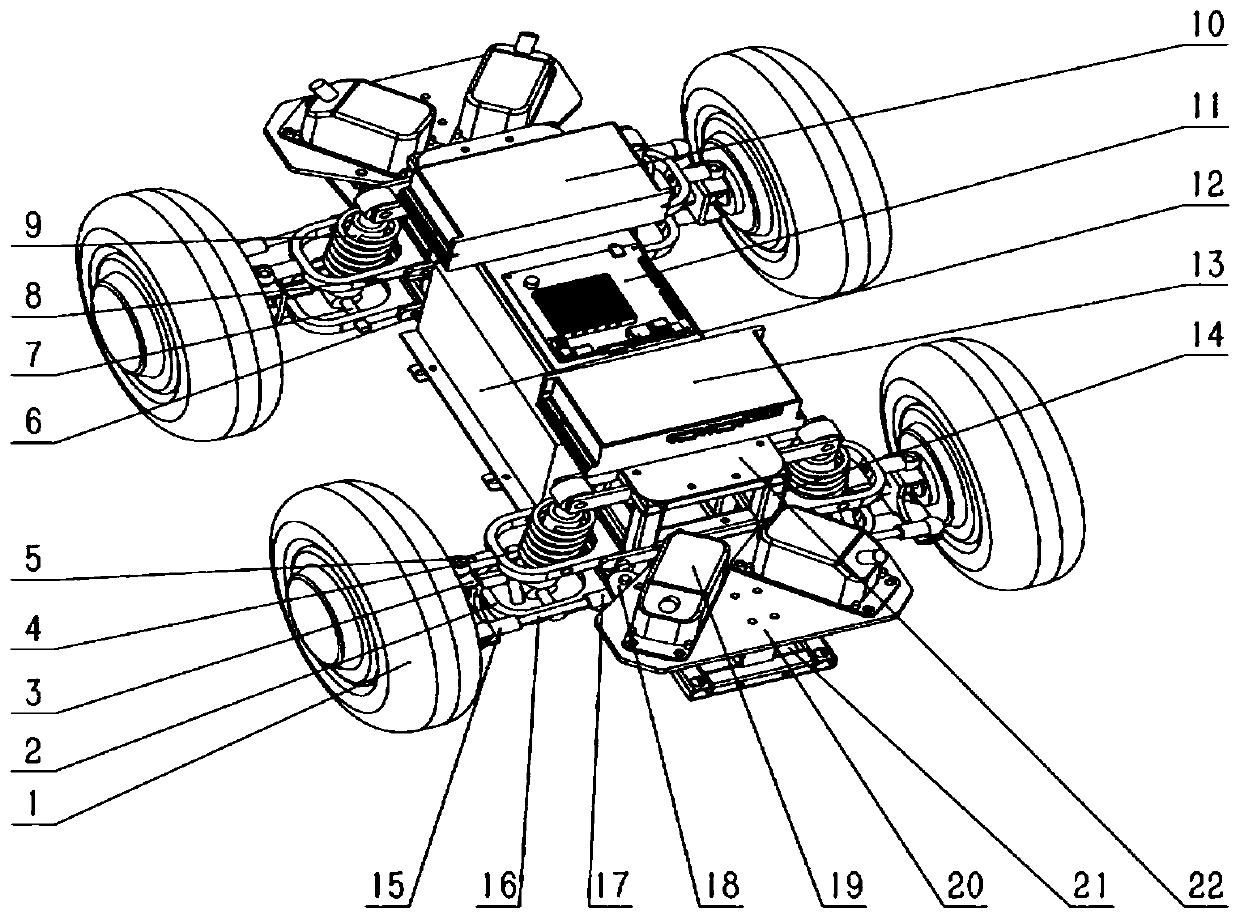
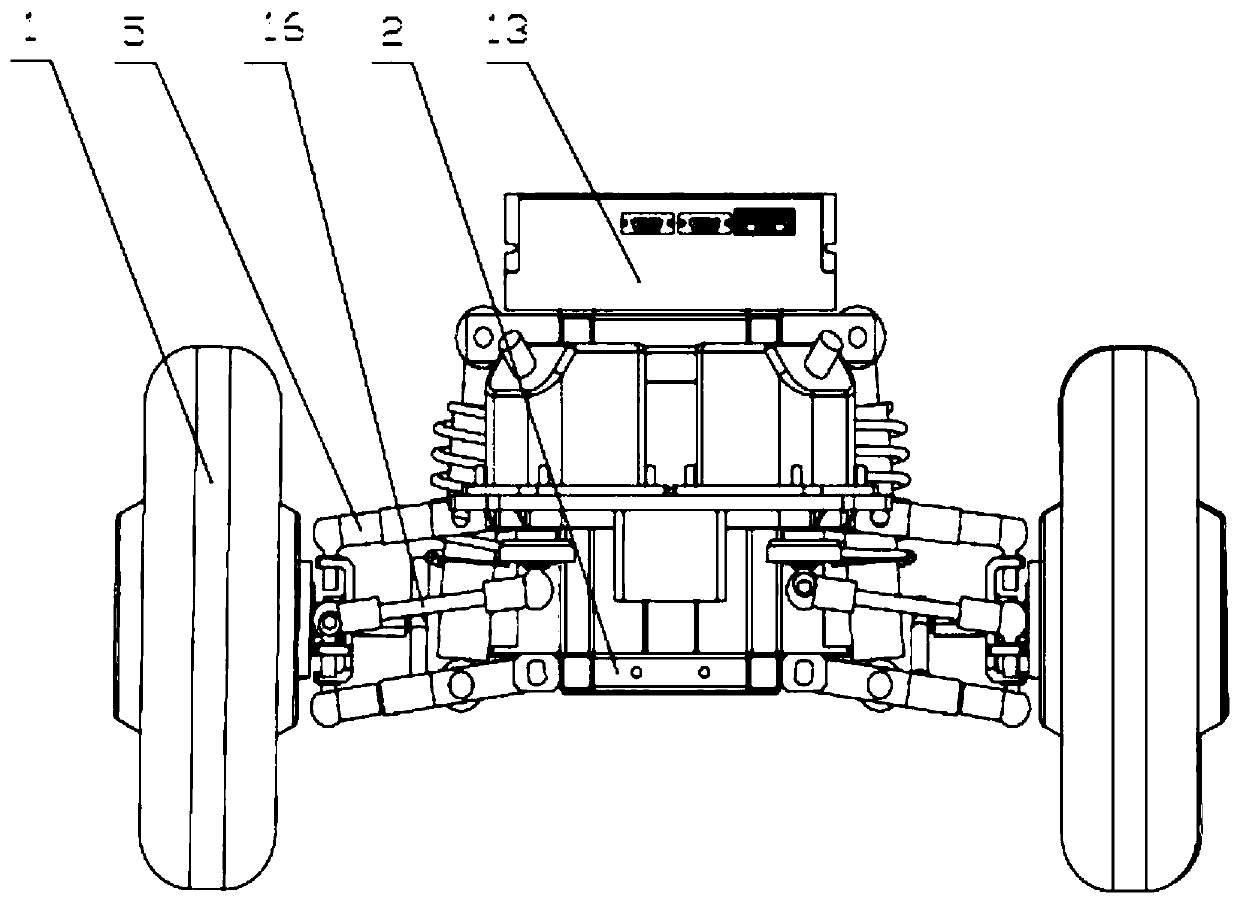
[0031] Such as Figure 1-3 Shown, a kind of four-wheel independent steering robot chassis comprises vehicle frame 14, driving mechanism, suspension mechanism, steering mechanism and control mechanism, and driving mechanism, suspension mechanism, steering mechanism and control mechanism are all connected on the vehicle frame 14, and steering Both the mechanism and the driving mechanism are connected with the suspension mechanism;
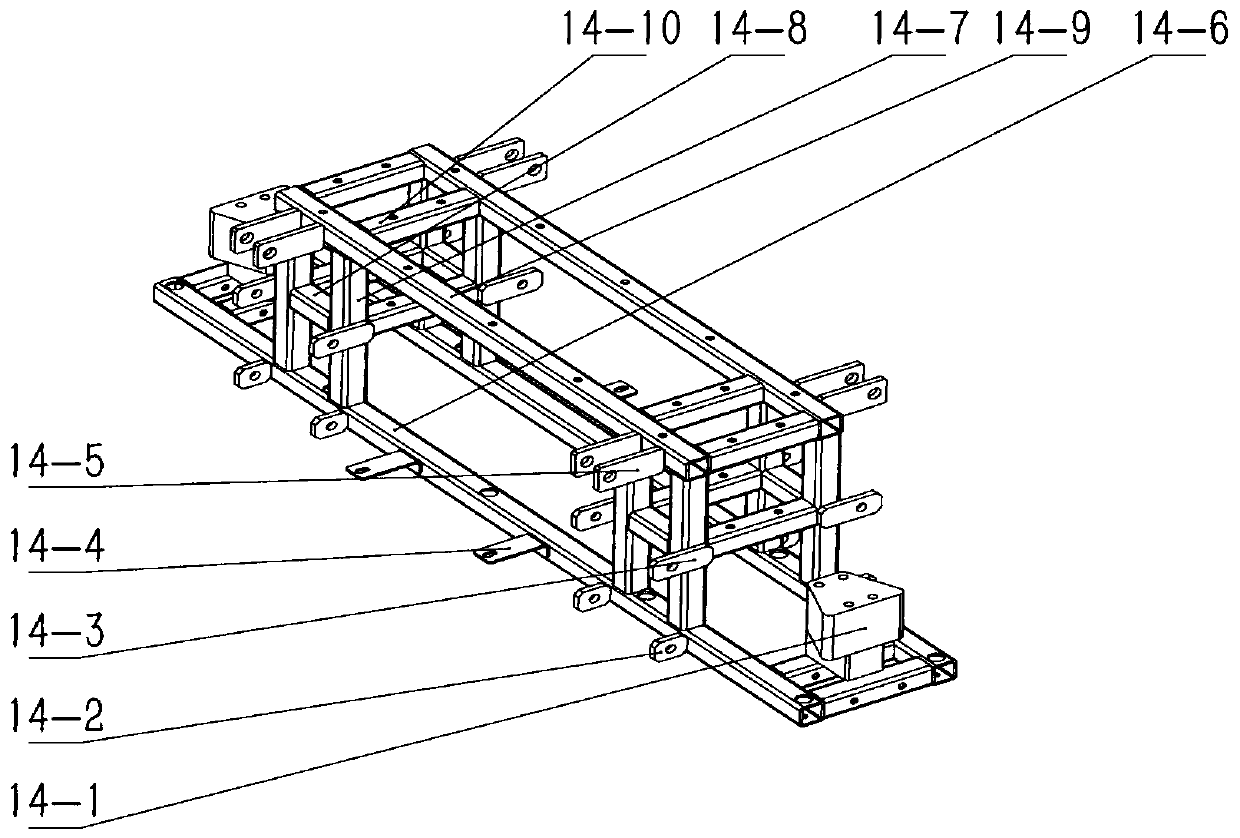
[0032] Vehicle frame 14 comprises block 14-1, lower suspension plate 14-2, upper suspension plate 14-3, battery plate 14-4, shock absorber plate 14-5, rectangular tube 14-6, vertical tube 14-7, short square tube 14-8, horizontal square tube 14-9 and small square tube 14-10, vehicle frame 14 is connected with vehicle frame lower plate 21 and vehicle frame upper plate 22, wherein spacer 14-1, Lower suspension plate 14-2, upper suspension plate 14-3, battery plate 14-4, shock absorber plate 14-5, rectangular tube 14-6, vertical square tube 14-7, short ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More