

Imitation fish propulsion mechanism of underwater robot
A technology for underwater robots and propulsion mechanisms, applied in the direction of non-rotating propulsion components, etc., can solve problems such as low motion efficiency, large moment of inertia, and short service life, so as to reduce loss, reduce moment of inertia, improve work performance and reliability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
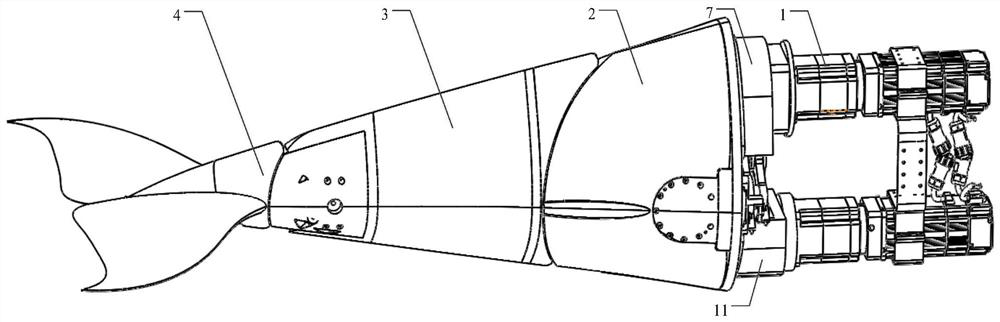
[0034] The invention discloses a fish-like propulsion mechanism of an underwater robot, which comprises a drive unit, a waist joint unit, a tail joint unit and a tail fin connected in sequence;
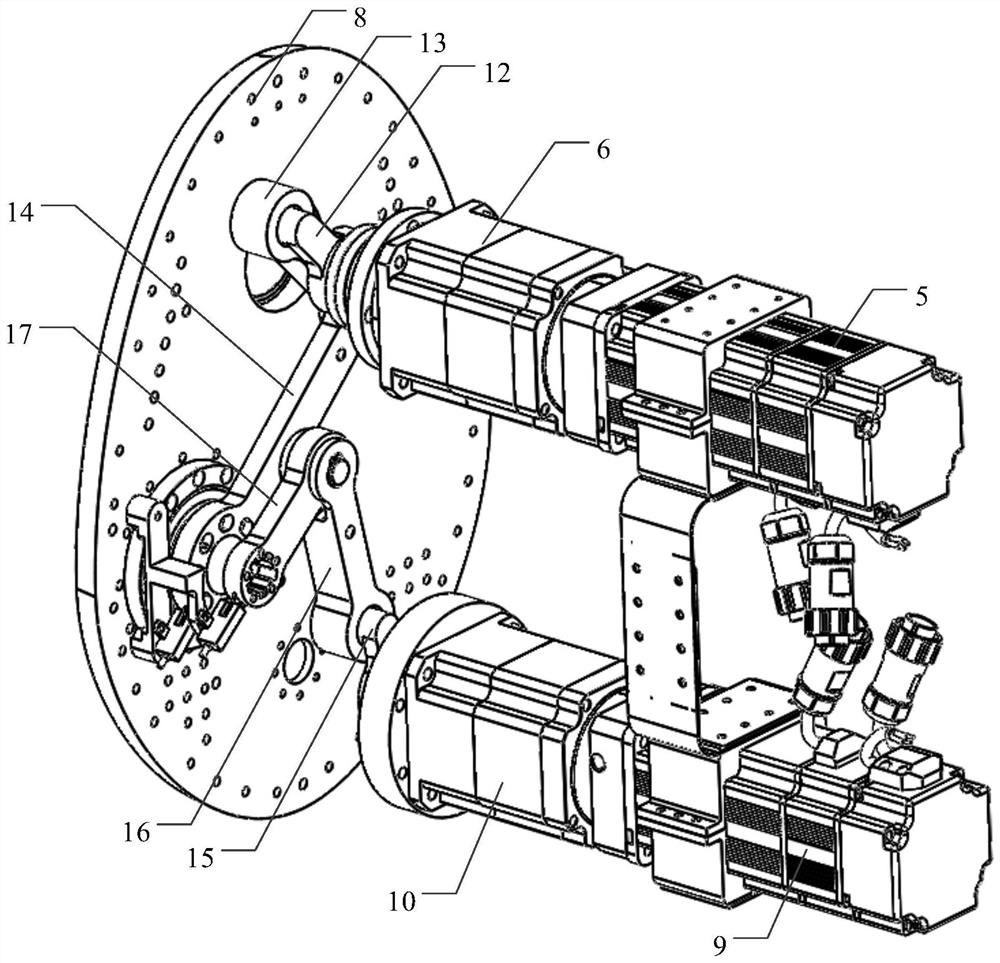
[0035] The drive unit includes a waist joint power device and a tail joint power device, the waist joint power device and the tail joint power device are respectively connected to the waist joint unit through a first transmission mechanism and a second transmission mechanism, and the connection ends are the same as Axis settings;
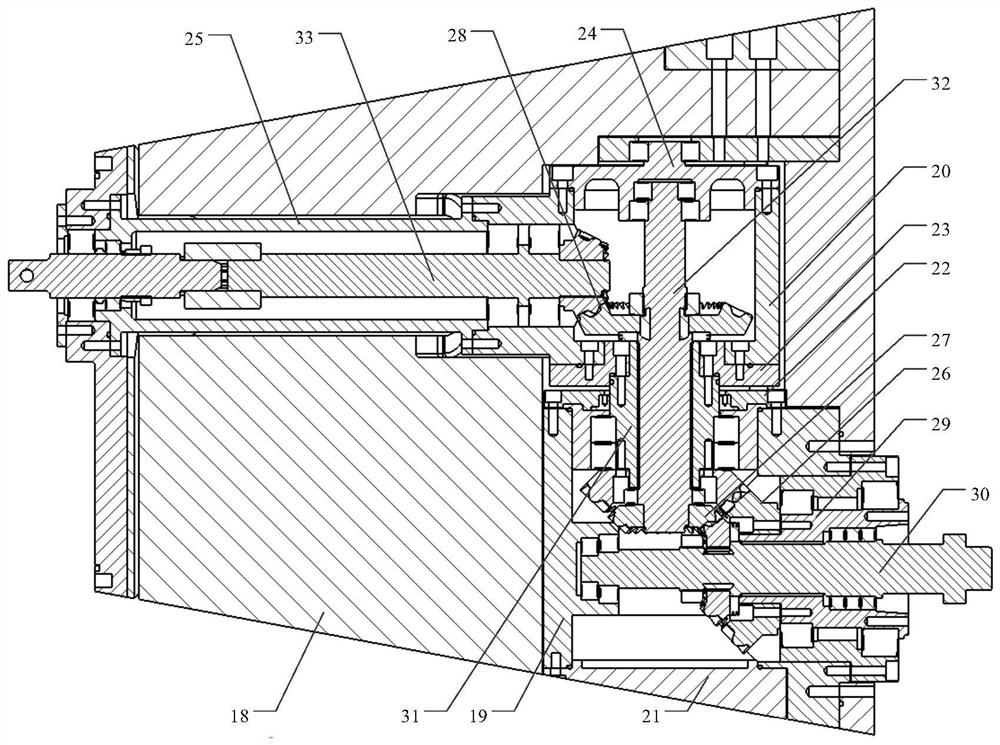
[0036] The waist joint unit includes a waist joint front cabin module and a waist joint rear cabin module, a third trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More