

Seven-degree-of-freedom series-parallel hybrid mechanical arm and robot
A degree of freedom, robotic arm technology, applied in the field of robotics, can solve the problems of large rotational inertia, insufficient flexibility and degrees of freedom of the robotic arm, and achieve the effect of flexible movement, simplified kinematics calculation model, and convenient kinematics solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
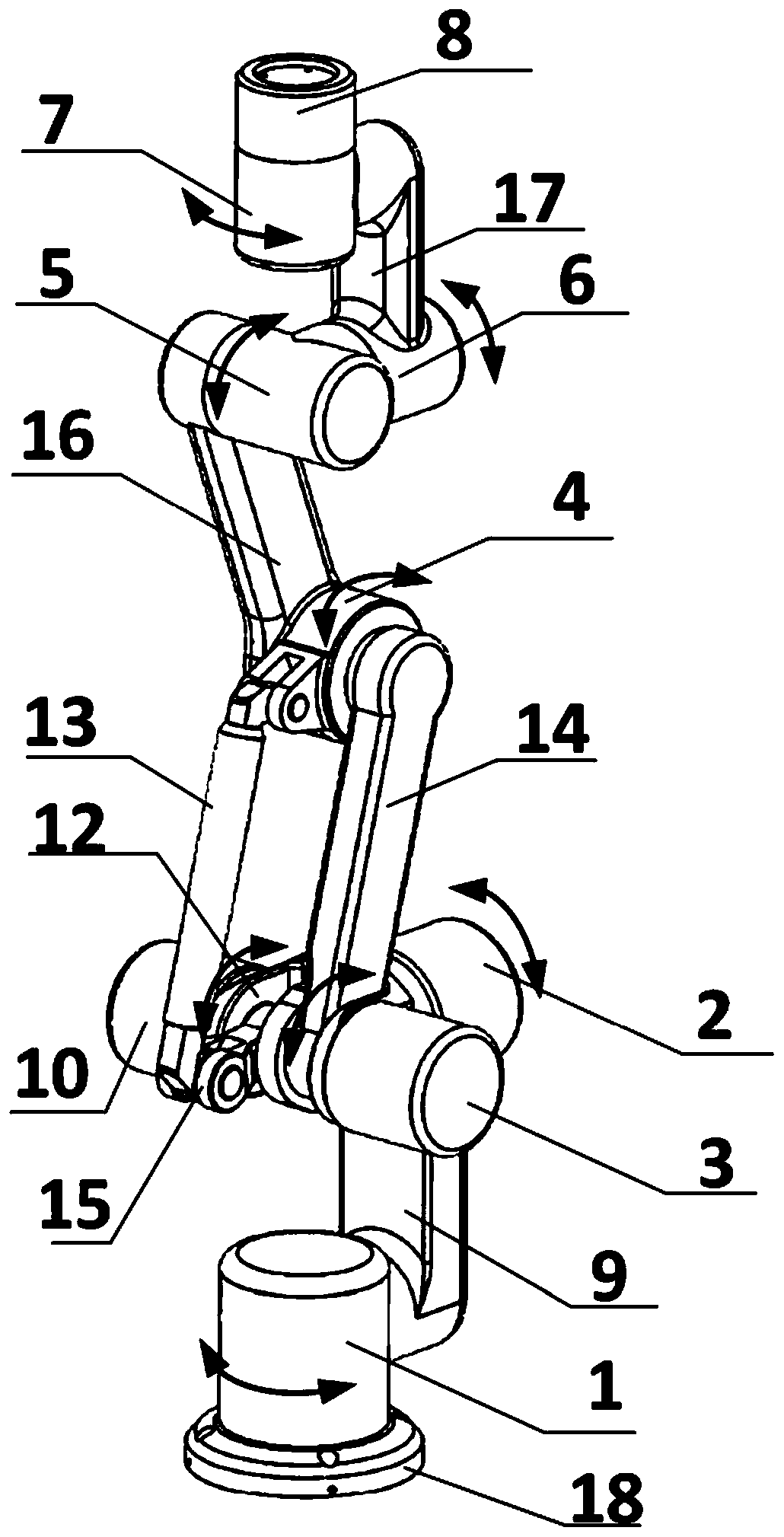
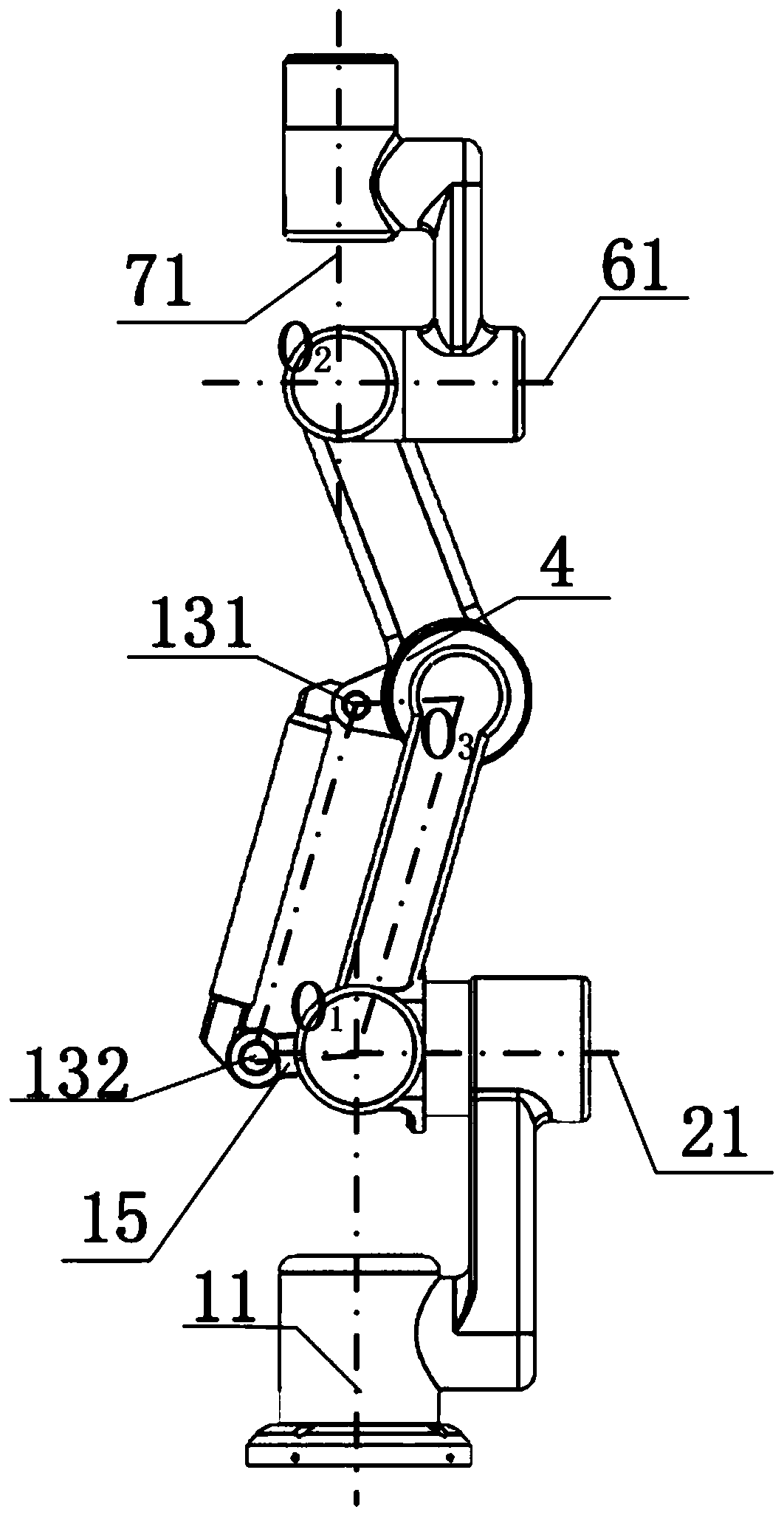
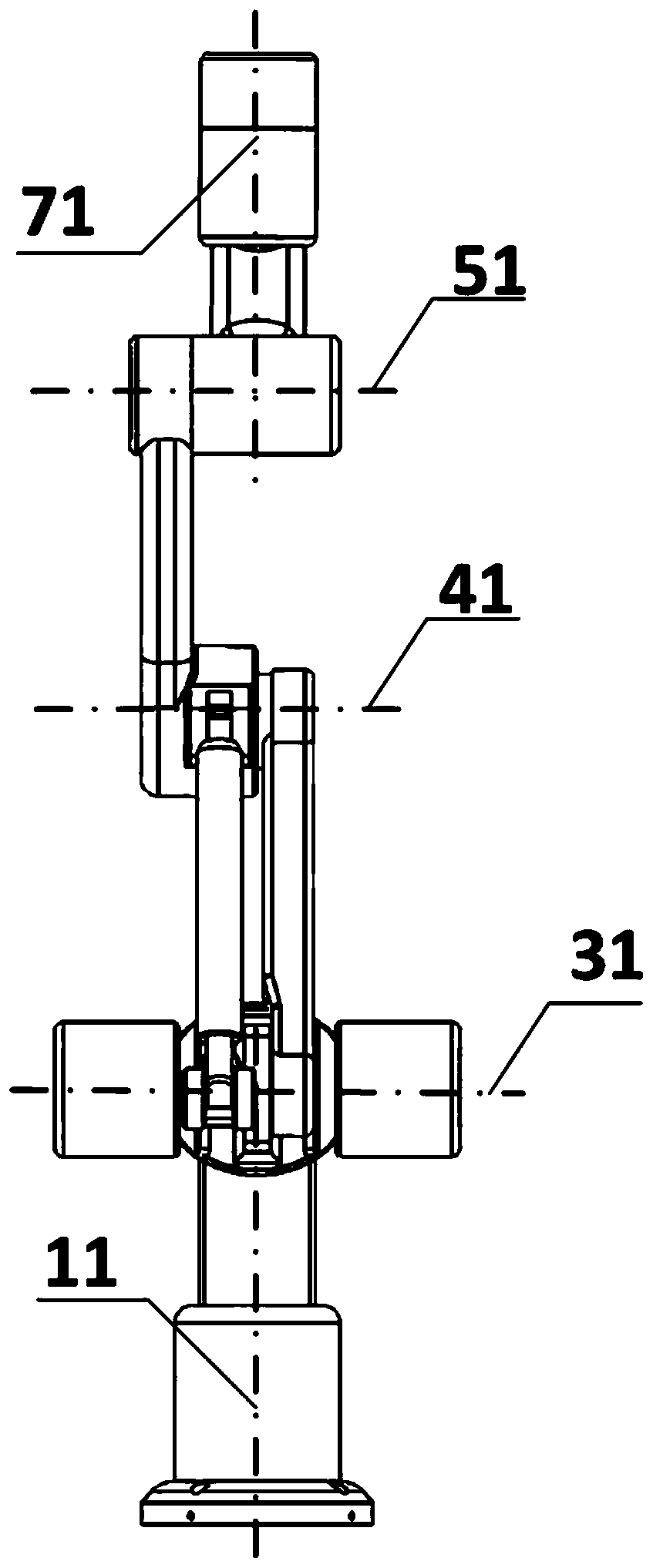
[0031] Such as Figure 1 to Figure 8 As shown, a seven-degree-of-freedom serial-parallel hybrid robot arm includes a base 18, a first joint 1, a first connecting rod 9, a second joint 2, a connecting bracket 12, a third joint 3, a second The connecting rod 14, the fourth joint 4, the fifth connecting rod 16, the fifth joint 5, the sixth joint 6, the sixth connecting rod 17, the seventh joint 7 and the connecting flange 8 of the end effector, the connecting bracket 12 is connected with The fourth joint motor housing 10; the fourth joint motor housing 10 and the third joint 3 are located on both sides of the second connecting rod 14 and are coaxial at the same height;
[0032] A third connecting rod 15 and a fourth connecting rod 13 are also arranged between the third joint 3 and the fourth joint 4. One end of the fourth connecting rod 13 is connected to the fourth joint 4 through a hinge 131, and the other end is connected to the third connecting rod through a hinge 132. The c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More