A method for obtaining 3D laser point cloud based on single-line lidar
A single-line laser radar and laser point cloud technology, applied in the re-radiation of electromagnetic waves, radio wave measurement systems, instruments, etc., can solve the problems of map distortion, single 2d laser point cloud information, etc., to increase the degree of freedom and avoid data distortion. , the effect of eliminating the cumulative error of rotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below with reference to the accompanying drawings and embodiments.
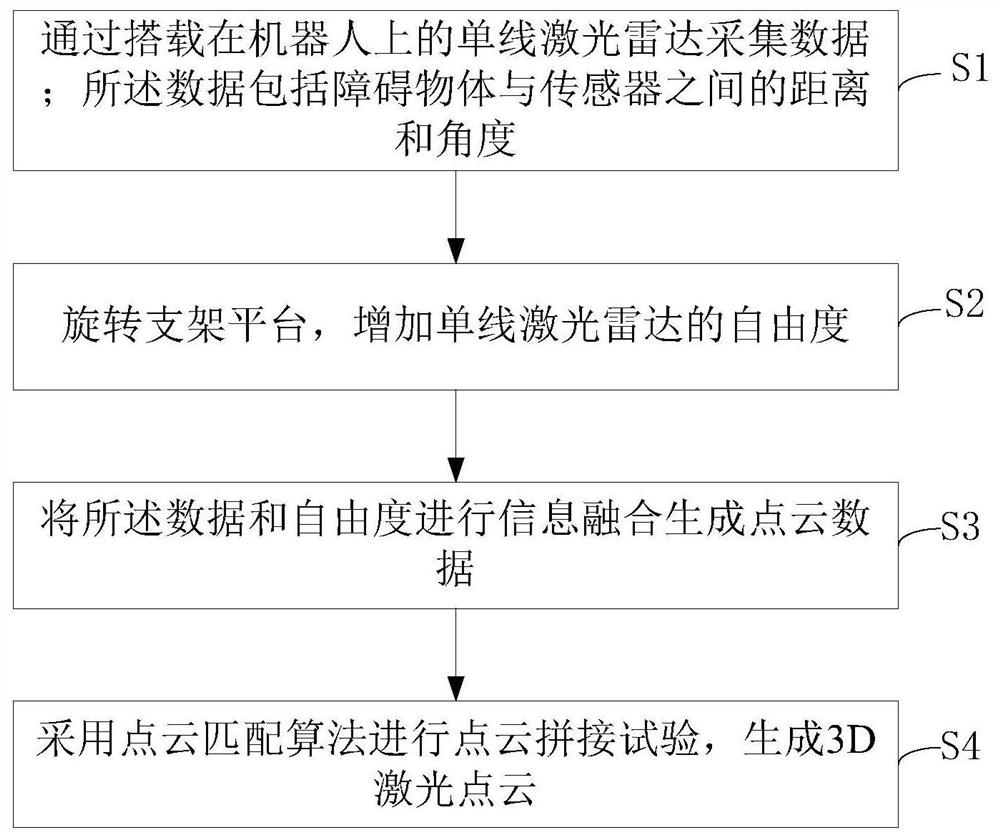
[0027] see Figure 1-3 , a method for acquiring 3D laser point cloud based on single-line lidar, including:
[0028] S1, collect data through the single-line lidar mounted on the robot; the data includes the distance and angle between the obstacle and the sensor;
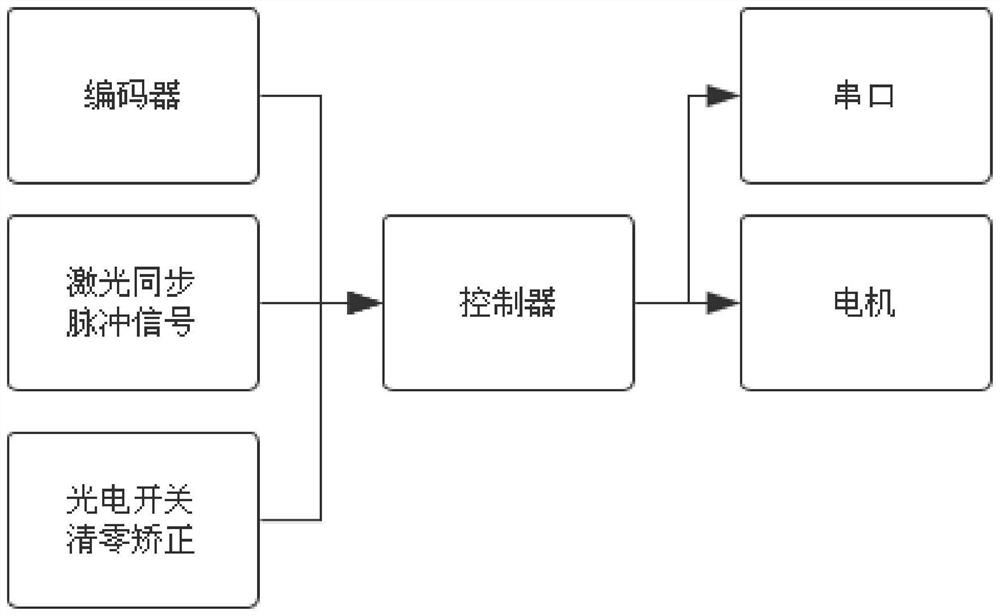
[0029] S2, rotate the support platform to increase the degree of freedom of the single-line laser radar; wherein the single-line laser radar is mounted on the support platform, and the support platform is mounted on the robot; further, step S2 includes: rotating the support platform, the single-line laser radar is mounted on the sensor coordinate system. Spin the x-axis, increase the degree of freedom of the single-line lidar, and obtain the current roll angle of the single-line lidar. Further, the robot is provided with an encoder, a controller and a motor connected by electrical signals in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More