

A Distributed Space-Time Coordinated Control Method for Heterogeneous UAV Swarm
A technology of space-time coordination and control method, applied in the direction of control/regulation system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problems of cluster confusion, no formation feedback, unfavorable group expansion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0112] The concrete steps of this embodiment are as follows:
[0113] 1. Set the parameters required for the simulation.
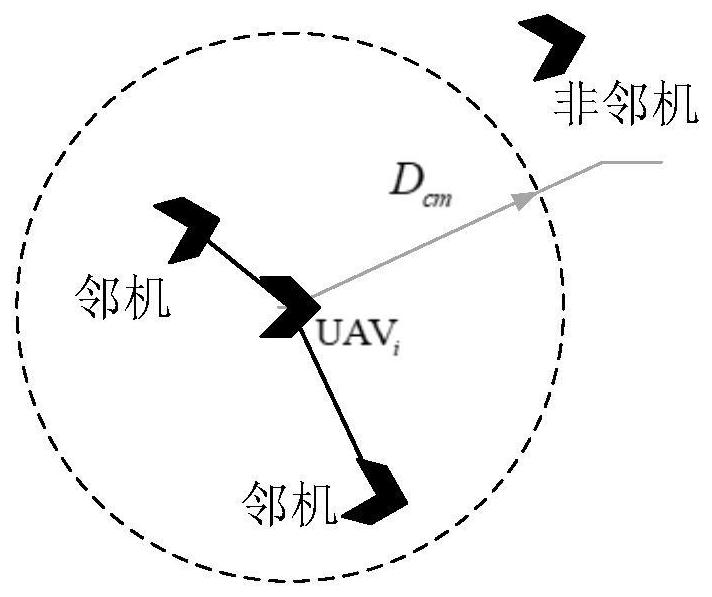
[0114] Let the maximum communication distance D cm =250m, the distance D between aircraft in the desired formation s =200m; the control period T in the distributed model predictive control c = 0.3s, prediction period T p =2.4s; the particle number N in the particle swarm optimization algorithm p =30, the threshold N of the number of iterations iter = 20, learning factor c 1 = 2,c 2 = 2, inertia coefficient weight w = 0.9; the virtual guide point always makes v along the positive direction of the x-axis r = 100m / s uniform linear motion.
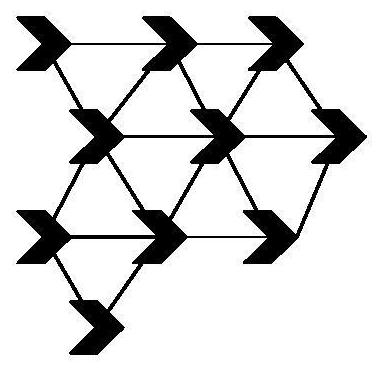
[0115] Given the initial state of 10 UAVs, some UAVs have established communication with each other, and the rest are isolated follower UAVs, such as Figure 9 shown. The initial state and role settings of each UAV are shown in Table 1.
[0116] Table 1 Initial states of 10 UAVs
[0117]
[0118]
[0119]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More