

Object pose measurement method and device and storage medium
A pose measurement and object technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of reducing the ability of model surface difference information expression, unable to comprehensively use color-depth, unable to compensate for noise deviation, etc. Efficient model sampling strategy, reducing point-to-feature calculation, and improving measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
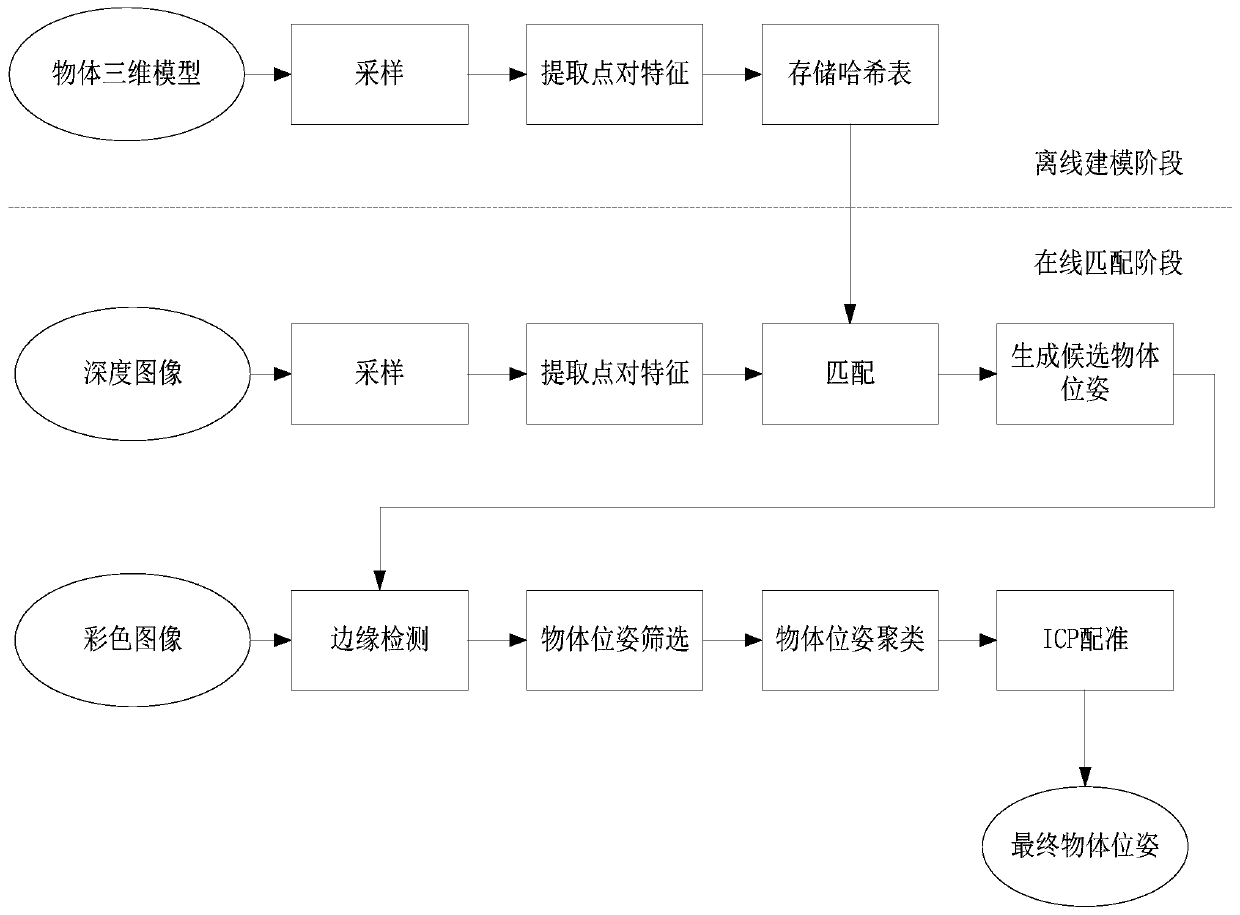
[0062] Such as figure 1 As stated, this embodiment includes a method for measuring the pose of an object, including an offline modeling phase and an online matching phase;
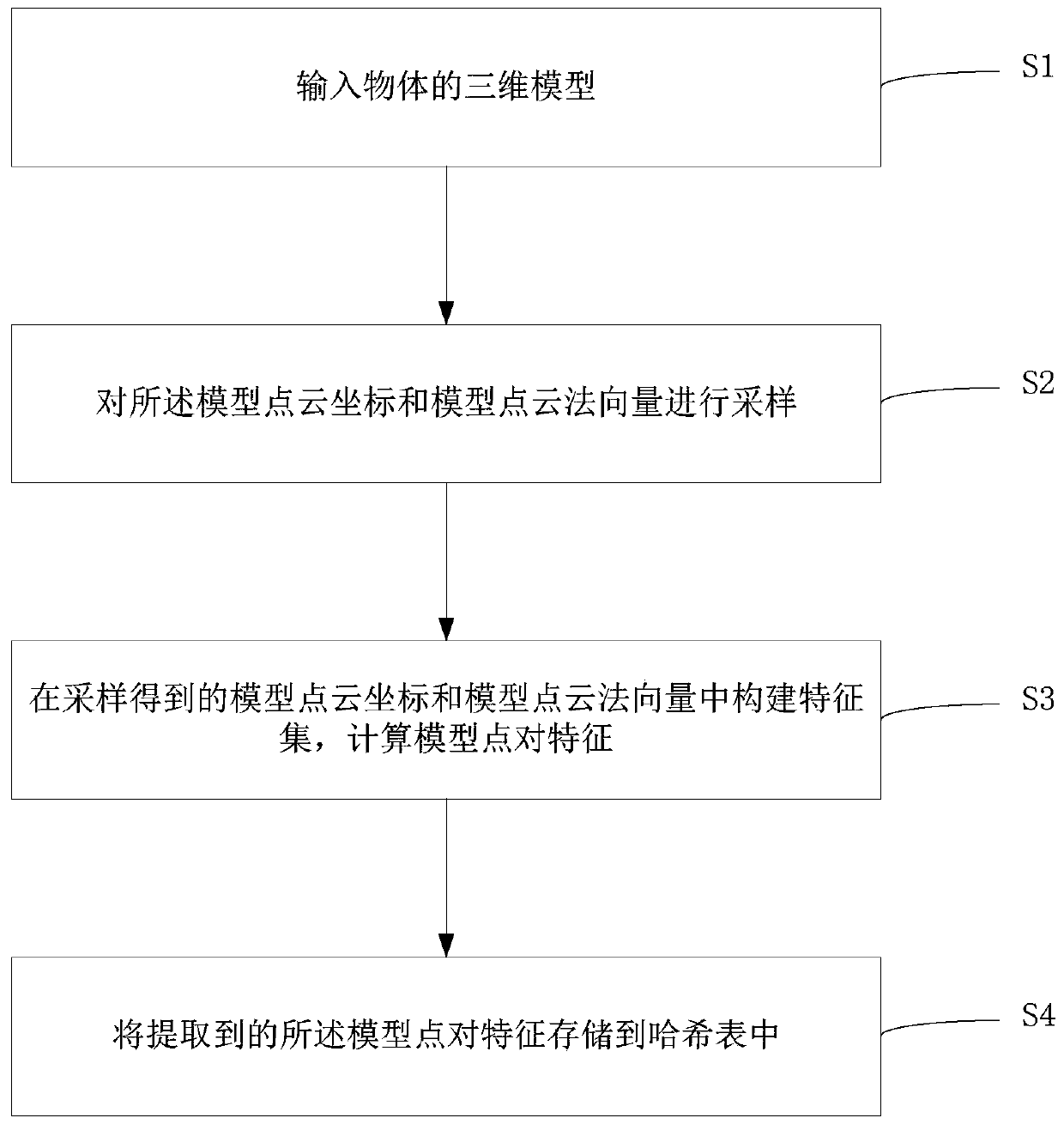
[0063] The offline modeling phase includes:
[0064] The three-dimensional model of input object, described three-dimensional model comprises model point cloud coordinates and model point cloud normal vector;
[0065] Sampling the model point cloud coordinates and the model point cloud normal vector;
[0066] Construct a feature set in the sampled model point cloud coordinates and model point cloud normal vectors, and calculate the model point pair features;
[0067] Store the extracted model point pair features in a hash table;
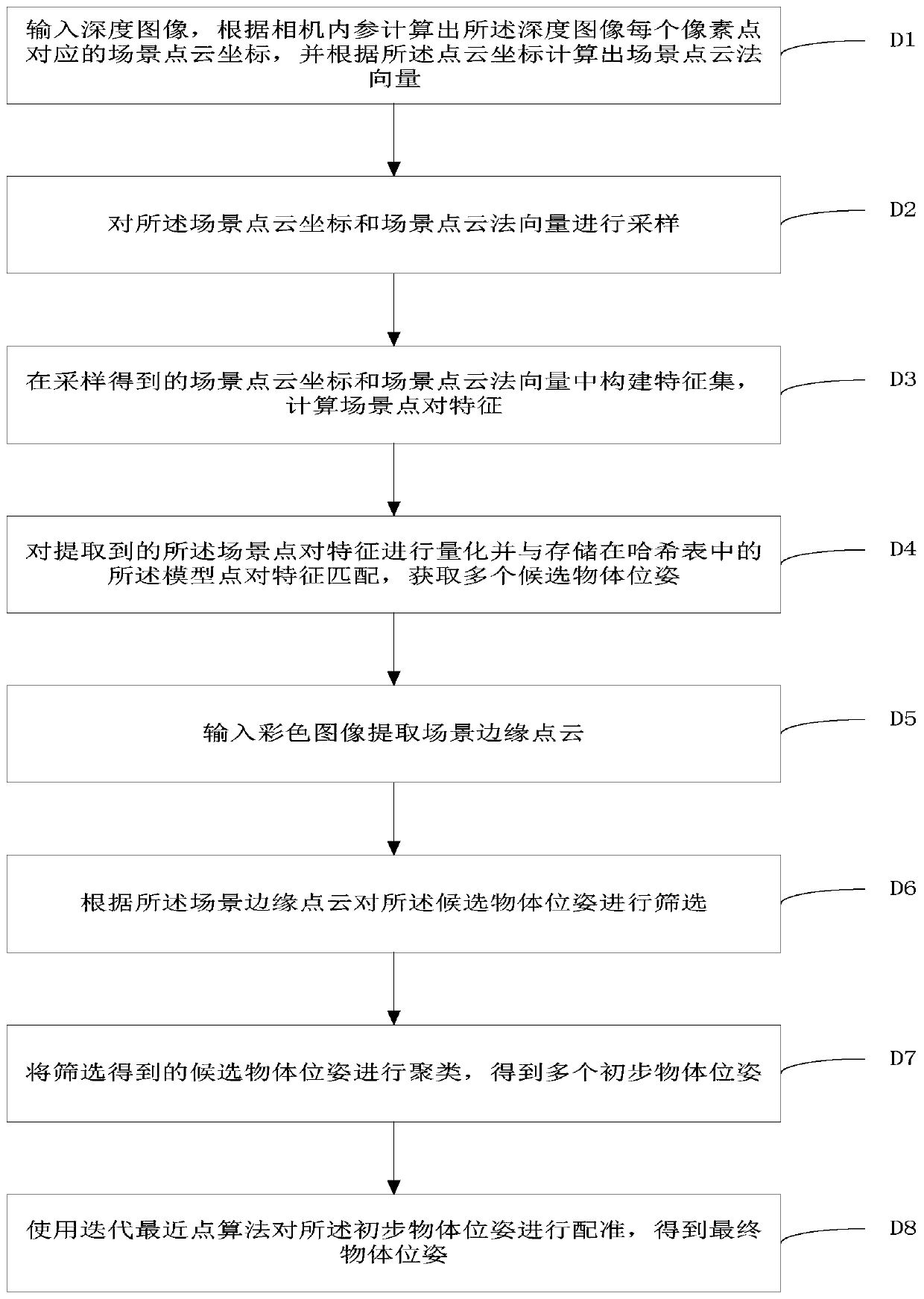
[0068] The online matching phase includes:
[0069] Input the depth image, calculate the scene point cloud coordinates corresponding to each pixel of the depth image according to the camera internal reference, and calculate the scene point cloud normal vector according to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More