

Task execution control method, task execution control device and task execution control equipment for robot as well as storage medium
A task execution and control method technology, applied in the field of robotics, can solve the problems of high robot use threshold, low robot use efficiency and utilization rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
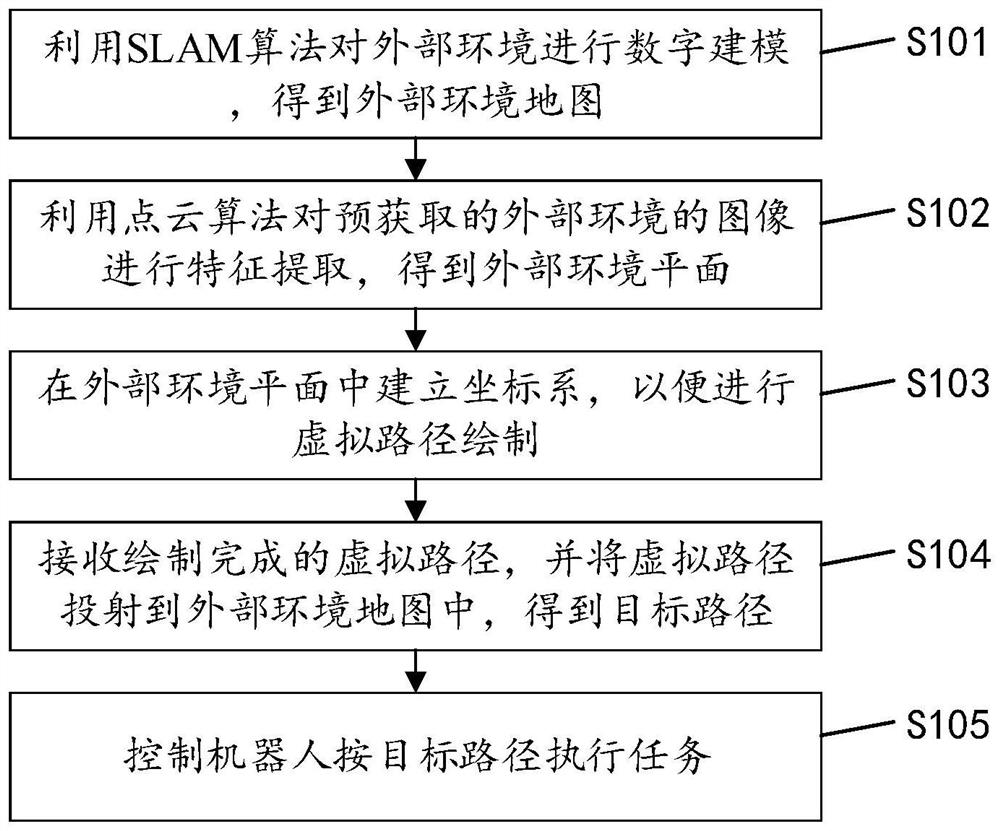
[0042] see figure 1 , figure 1 It is an implementation flowchart of the robot task execution control method in the embodiment of the present invention, which is applied to the target augmented reality device, and the method may include the following steps:
[0043] S101: Using a SLAM algorithm to digitally model the external environment to obtain a map of the external environment.
[0044] When it is necessary to control the robot to perform tasks, the target augmented reality AR device uses the SLAM algorithm to digitally model the external environment to obtain a map of the external environment. The SLAM algorithm is one of the core technologies of augmented reality technology. By using the SLAM algorithm, when the robot starts from an unknown location in an unknown environment, it can locate itself relative to the unknown environment by repeatedly observing the terrain features during the movement process. That is, through the SLAM algorithm, the target augmented reality ...
Embodiment 2
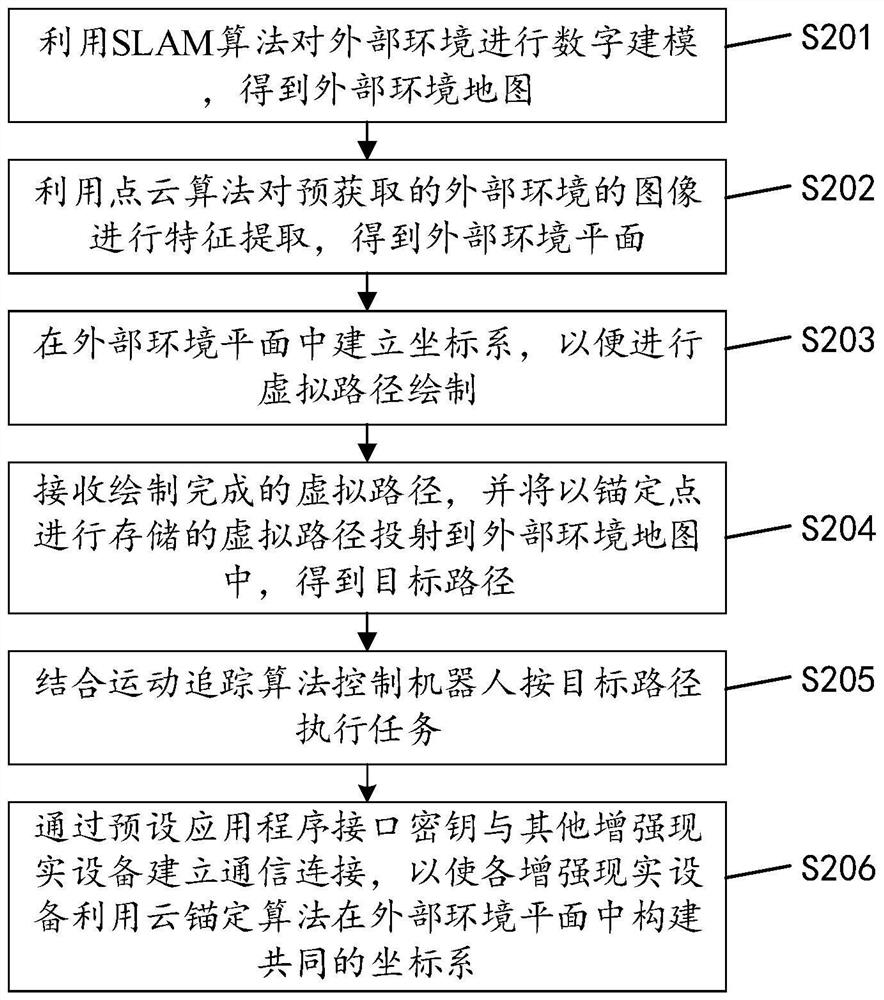
[0057] see figure 2 , figure 2 It is another implementation flowchart of the robot task execution control method in the embodiment of the present invention, which is applied to the target augmented reality device, and the method may include the following steps:
[0058] S201: Using a SLAM algorithm to digitally model the external environment to obtain a map of the external environment.
[0059] S202: Using a point cloud algorithm to perform feature extraction on the pre-acquired image of the external environment to obtain an external environment plane.
[0060] S203: Establish a coordinate system in the external environment plane, so as to draw a virtual path.
[0061] S204: Receive the drawn virtual path, and project the virtual path stored as an anchor point into an external environment map to obtain a target path.
[0062] The received virtual path is stored as anchor points, which accurately record the exact coordinates of the virtual path projected into the real scen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More