

Method, device and storage medium for free fault-tolerant gait planning of hexapod robot
A technology of hexapod robot and gait planning, which is applied in the direction of instruments, motor vehicles, attitude control, etc., and can solve the problems of no foothold and no foothold
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
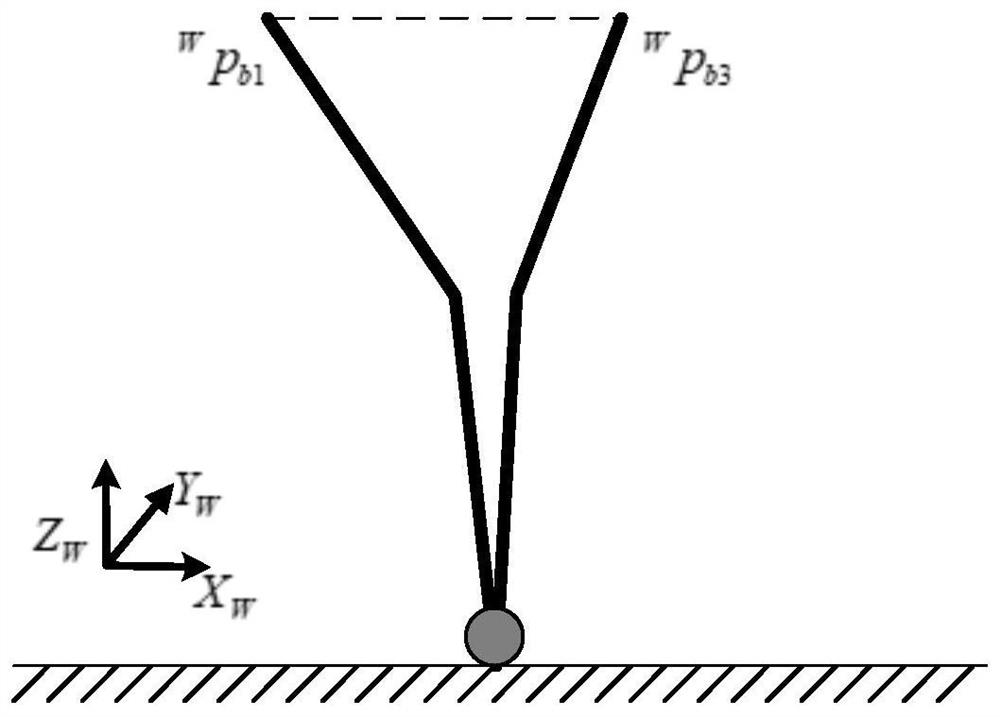
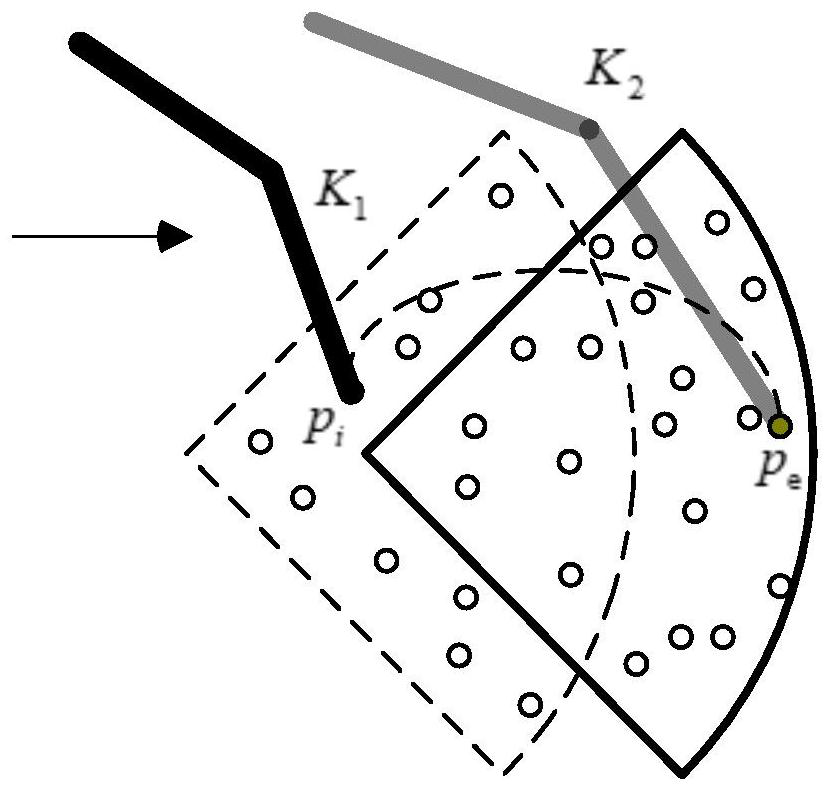
[0036] It should be noted that the coordinate system X in this paper W Y W Z W is the body coordinate system of the hexapod robot. The direction of the arrow in the accompanying drawings is the body movement direction of the hexapod robot. At the same time, it should be noted that the terms "first" and "second" in the description and claims of the present invention and the above-mentioned drawings are used to distinguish Similar objects are not necessarily used to describe a particular order or sequence. In the description of the present invention, "plurality" means at least two, such as two, three, etc., unless otherwise specifically defined. It is to be understood that the data so used are interchangeable under appropriate circumstan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More