

Method of high precision force feedback of mechanical arm in stationary or low speed working condition
A mechanical arm and force feedback technology, applied in the field of robotics, can solve the problems of high computing cost and occupy large resources, and achieve the effect of accurate force feedback, reducing requirements and reducing the number of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Below in conjunction with specific embodiment and accompanying drawing, the present invention is further elaborated and illustrated:
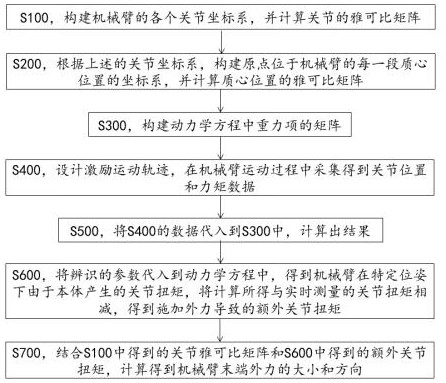
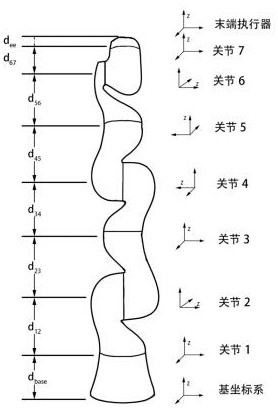
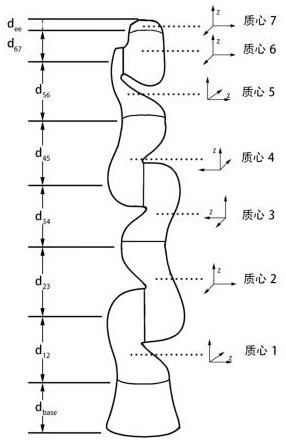
[0022] Please refer to figure 1 , In order to explain the technical details contained in the steps more specifically, the present invention will be further explained below in conjunction with the accompanying drawings and the actual operation on the KUKALBR Med 7 R800 seven-axis collaborative robot arm.
[0023] The complete dynamic equation should include the inertia term B(q), centrifugal force and Coriolis force term Gravity term G(q), viscous friction term F v and the Coulomb friction term F c . q in the equation, represent the position, velocity and acceleration of the joint, respectively. When the working condition is static or low-speed motion, the joint speed and acceleration is close to 0, only the gravity item is reserved to adapt to the static or low-speed working conditions, so the dynamic equation can be simplifie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More