

Inversion anti-integral saturation method for precision motion control
A precision motion, anti-integration technology, applied in electric controllers, controllers with specific characteristics, etc., can solve the problems of prone to integral saturation, prolonged positioning motion and uniform scanning motion establishment time, etc., to reduce the establishment time, The effect of reducing the positioning movement and the establishment time of constant speed scanning and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047]In order to make the purpose, features, and advantages of the application more obvious and understandable, the technical solutions in the embodiments of the application will be clearly and completely described below in conjunction with the drawings in the embodiments of the application. Obviously, the described The embodiments are only some of the embodiments of the present application, but not all of them. Based on the embodiments in this application, all other embodiments obtained by those skilled in the art without making creative efforts belong to the scope of protection of this application.
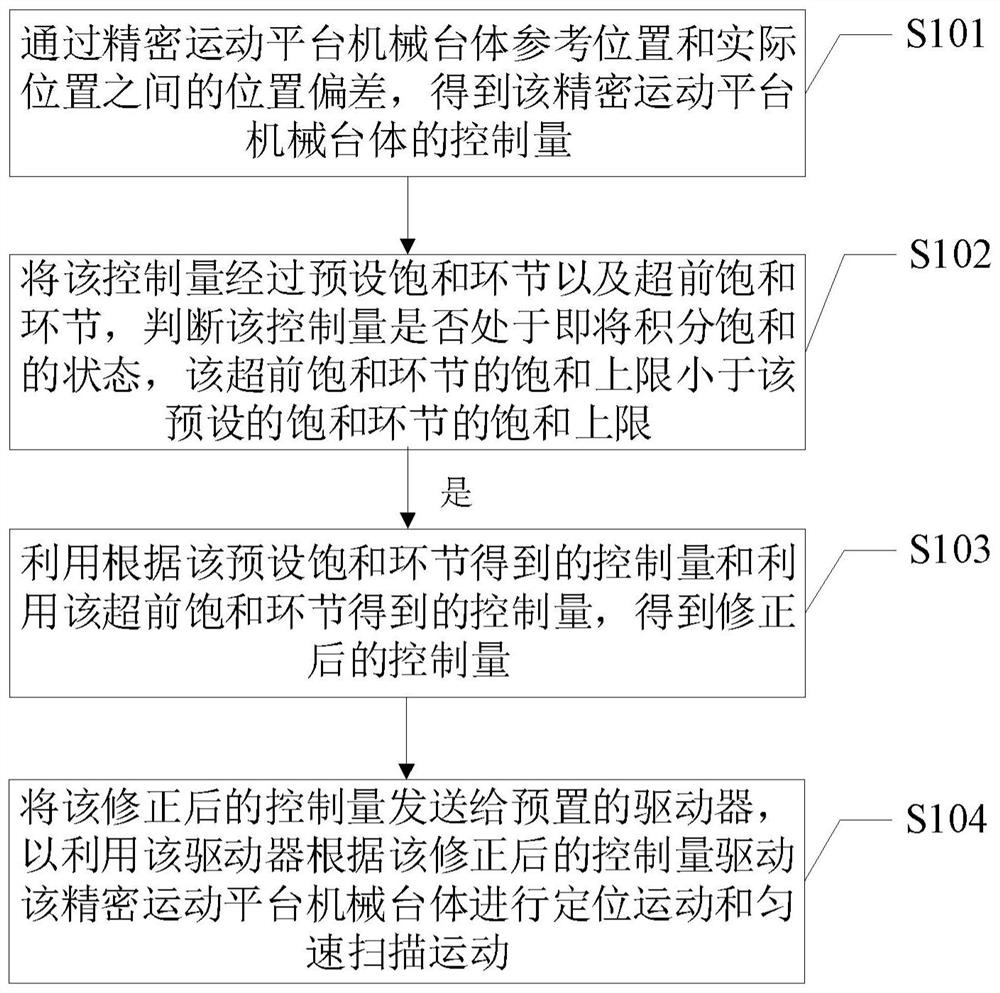
[0048] see figure 1 , figure 1 It is a schematic flow chart of an inversion anti-integral windup motion control method for a precision motion platform provided by an embodiment of the present application. The method mainly includes the following steps:
[0049] S101. Obtain the control amount of the mechanical table body of the precision motion platform through the position d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More