

Flexible cable driven waist rehabilitation robot state interval response domain prediction method
A waist rehabilitation and cable-driven technology, applied in passive exercise equipment, complex mathematical operations, physical therapy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
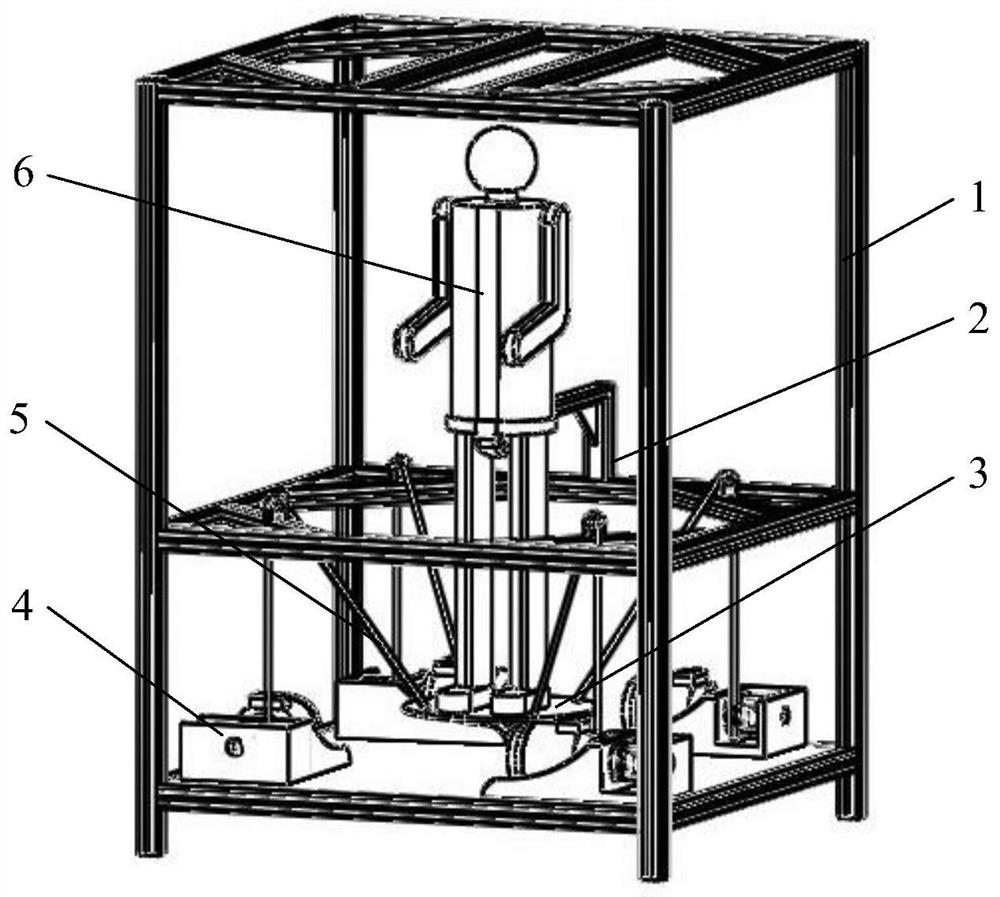
[0127] see figure 1 and figure 2 , applied to the acquisition of the response domain of the state interval of the cable-driven waist rehabilitation robot, the solution to the problem of the response domain of the state interval of the cable-driven waist rehabilitation robot is carried out according to the above steps. For the specific process of implementing the prediction method of the state interval response domain of the soft cable-driven waist rehabilitation robot in the computer, further description is as follows:
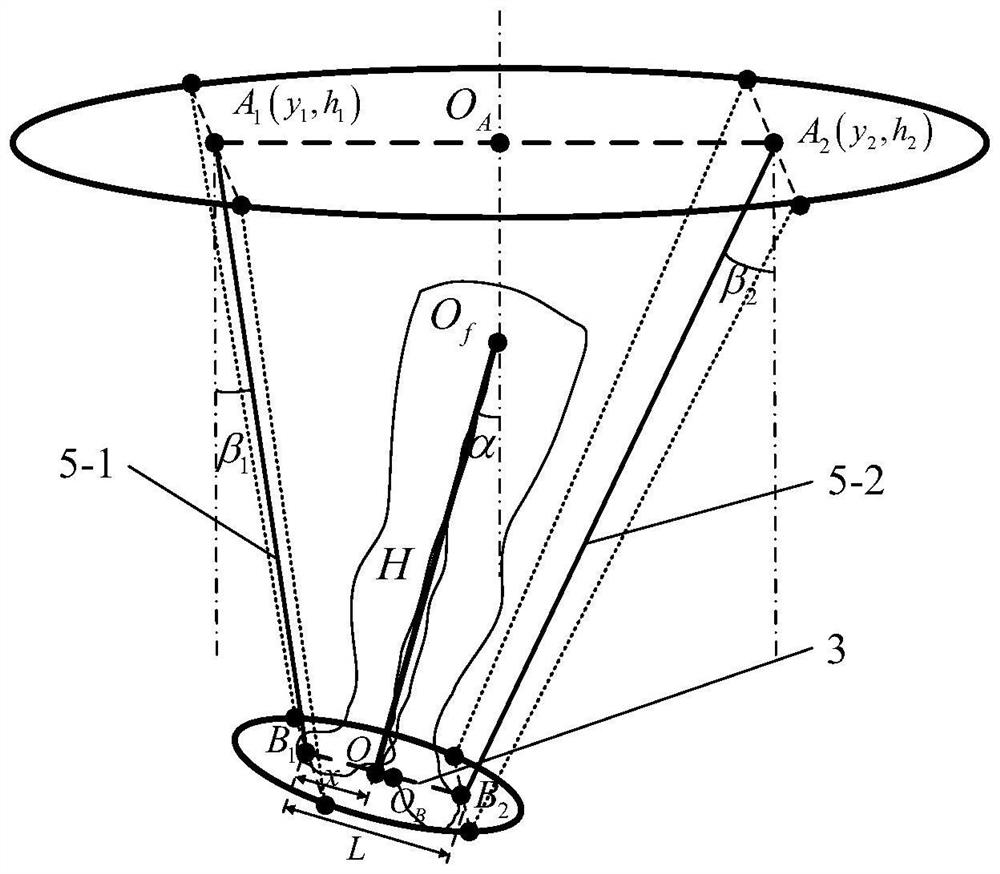
[0128] image 3 It is a schematic diagram of the equivalent geometric model of the flexible cable-driven waist rehabilitation robot corresponding to this embodiment, wherein the equivalent flexible cable 5-1 on the left side and the equivalent flexible cable 5-2 on the right side are connected to the upper ends of the main frame 1 The fixed bracket is connected, the lower end is connected with the lower limb training platform 3, and the joints of the flexib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More