Track spoofing method based on GPS navigation
A GPS navigation and trajectory technology, applied in the GPS field, can solve the problems of interference, trajectory deception, and inability to accept communication control signals, i.e. remote control signals, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039]Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention. It should be noted that in the following description, when detailed descriptions of known functions and designs may dilute the main content of the present invention, these descriptions will be omitted here.
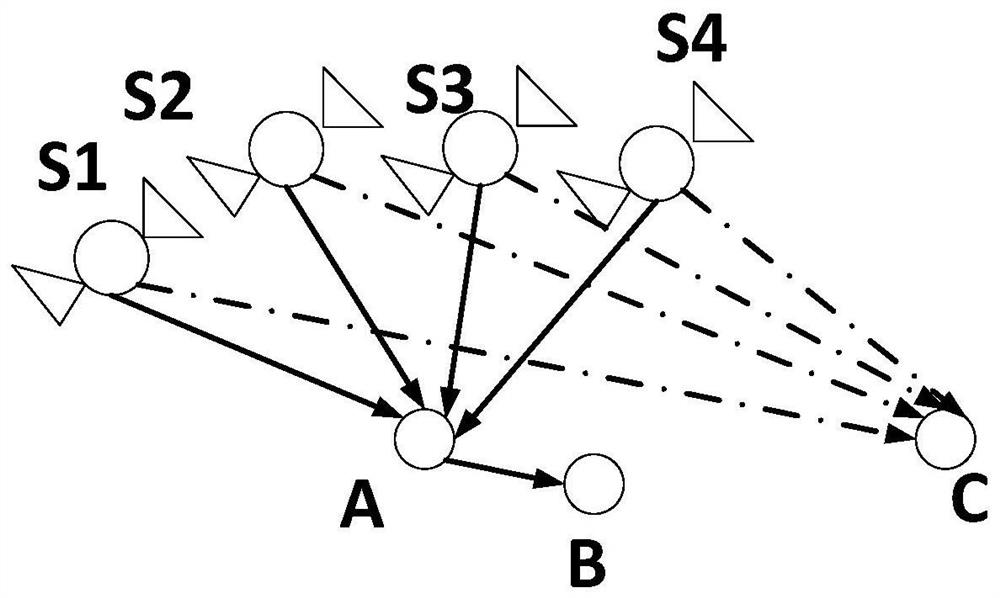
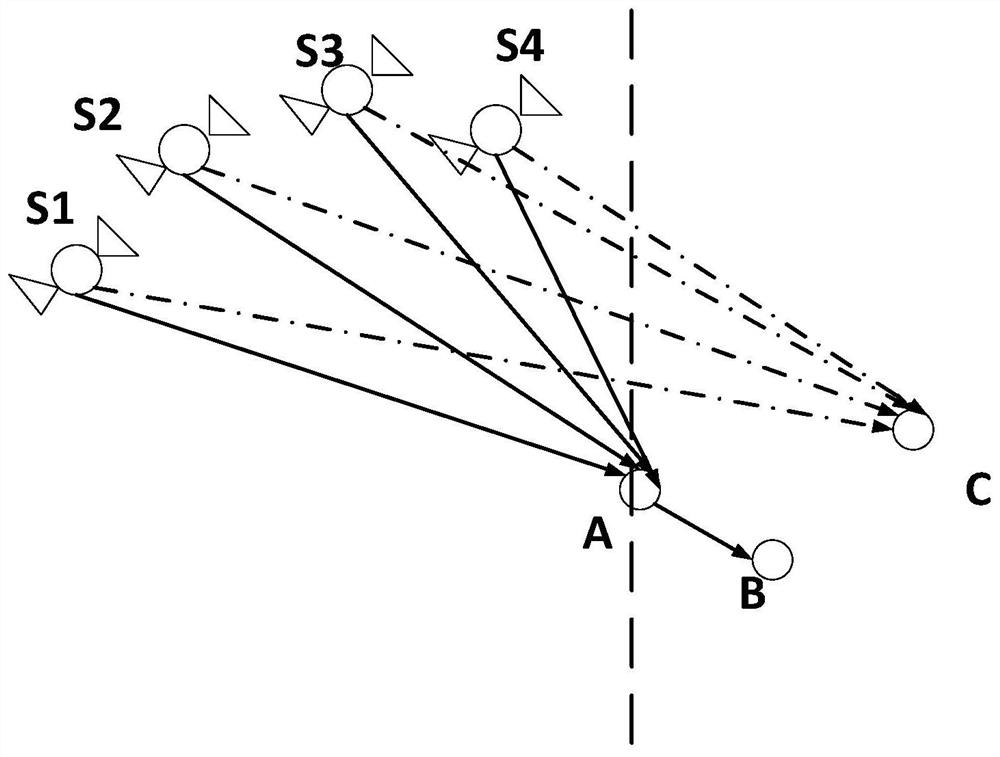
[0040] 1. The principle of forwarding deception interference
[0041] For spoofing interference, there are generally two types: forwarding type and generating type. Because most of the pseudo codes in military use are P codes or Y codes, the cycle is long and the structure is complicated, because it is not easy to crack and generate, while in civilian use, C / A codes are mostly used. Moreover, the short-period structure is simple and easy to generate. Therefore, in general, the forwarding interference does not need to demodulate satellite signals, know the signal structure an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More