

Multi-rotor unmanned aerial vehicle route planning and aerial photography method suitable for strip-shaped measuring area
A multi-rotor UAV, UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve problems such as many flight sorties, UAV power consumption, etc. Economic benefits, increased airline efficiency, and reduced airline redundancy coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
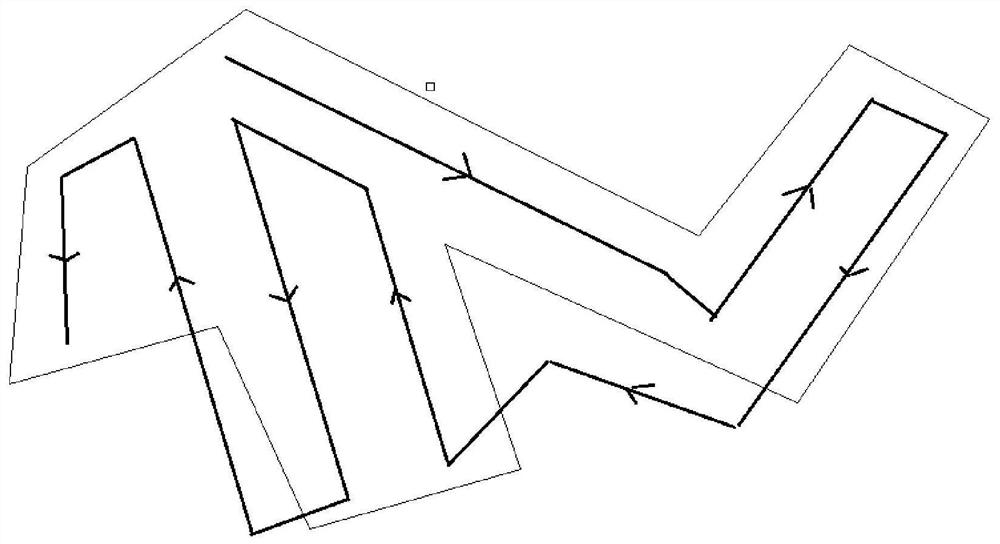
[0033] Specific implementation mode one: refer to Figure 7 and Figure 8 This embodiment is described in detail. A method for route planning and aerial photography of a multi-rotor UAV suitable for a belt-shaped survey area described in this embodiment includes the following steps:
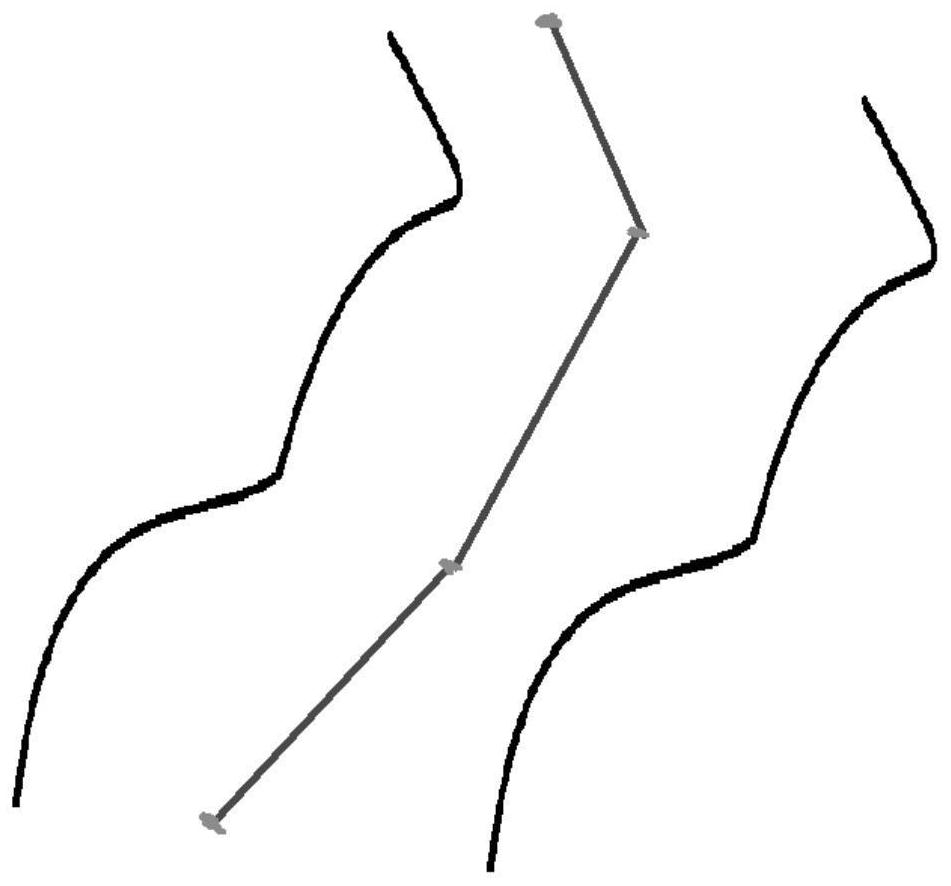
[0034] Step 1. Collect the centerline of the strip-shaped area: collect the centerline according to the direction of the area in the strip-shaped operation area, such as the centerline of the road, collect points according to the direction of the road, and generate a polyline segment, such as figure 2 shown;
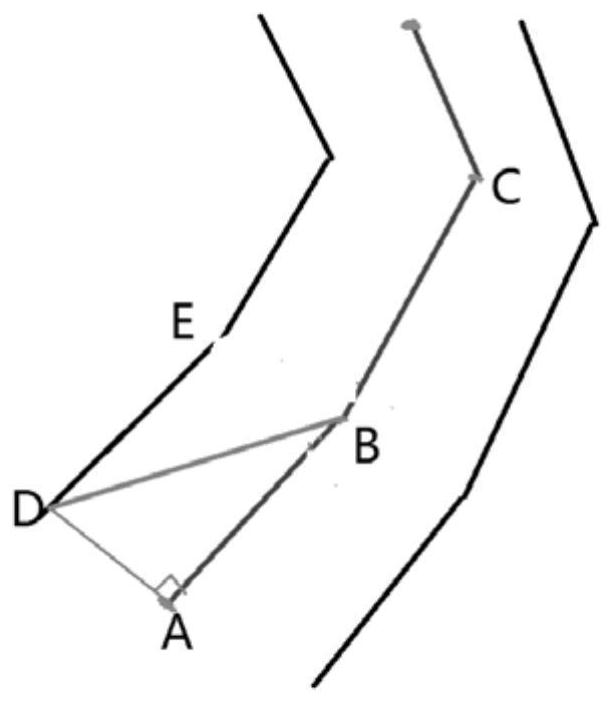
[0035] Step 2. Generate stitched rectangular area: set the route width d according to the width of the road, and translate the center line to both sides by a distance d to generate an aerial survey area. Knowing the coordinates of A, B, and C, you can calculate the upper edge of the survey area The coordinates of two points D and E.
[0036] First, the coordinates of A and B are known, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More