

A method and device for correcting the normal direction of robot drilling and riveting based on laser scanning
A technology of laser scanning and robotics, which is applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of low calculation efficiency, long data collection time and multiple calculations, and achieve the effect of high alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
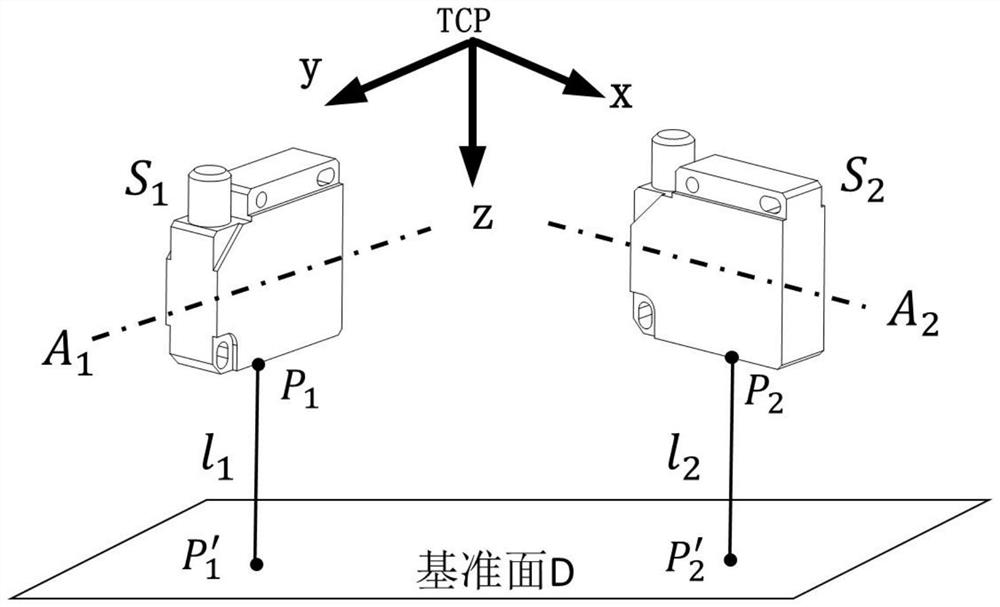
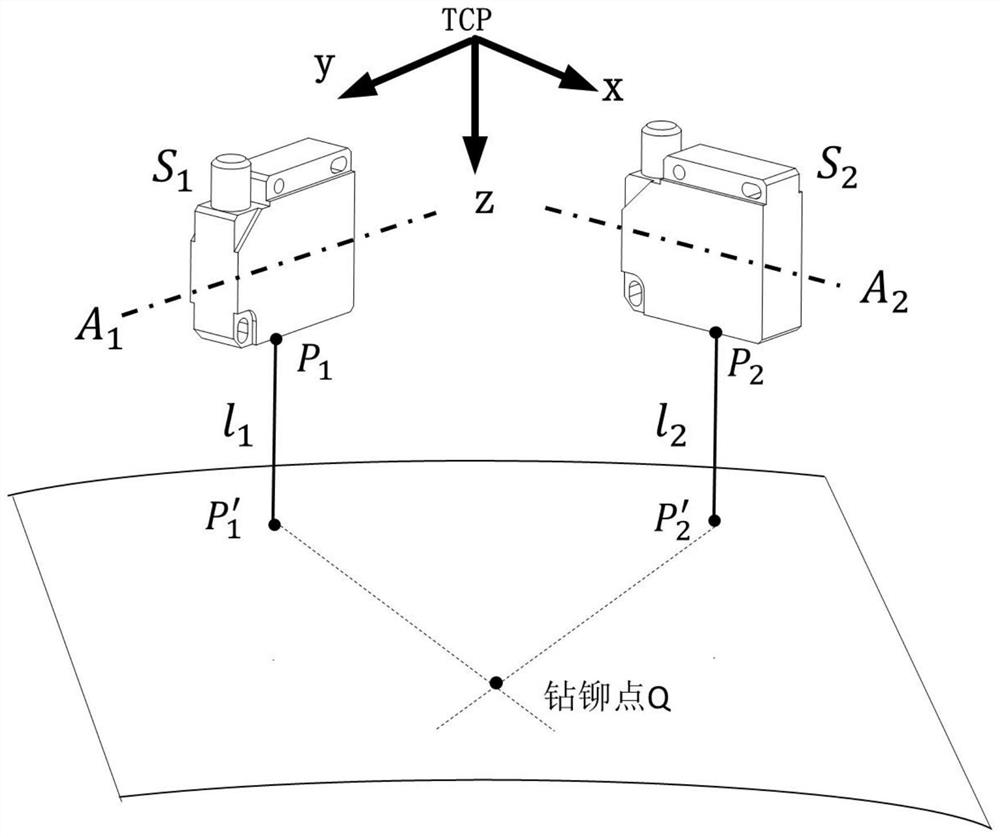
[0049] This embodiment proposes a method for correcting the normal direction of robot drilling and riveting based on laser scanning, and sets mutually perpendicular laser distance sensors S1 2 and laser distance sensors S2 5, and obtains by rotating the laser distance sensors S1 2 and laser distance sensors S2 5 Two sets of cross scanning measurement point data, and calculate the normal angle deviation of processing on the skin surface according to the scanning measurement point data , the specific calculation steps are as follows:
[0050] (1) First set the laser distance sensors S1 2 and laser distance sensors S2 5 perpendicular to each other, and then calibrate the laser distance sensors S1 2 and laser distance sensors S2 5. The specific calibration steps include:
[0051] Step S1. establishes the TCP coordinate system, sets the coordinates of the laser distance sensor S1 2 and the laser distance sensor S2 5 under the TCP coordinate system as , wherein the subscript i=1,...
Embodiment 2
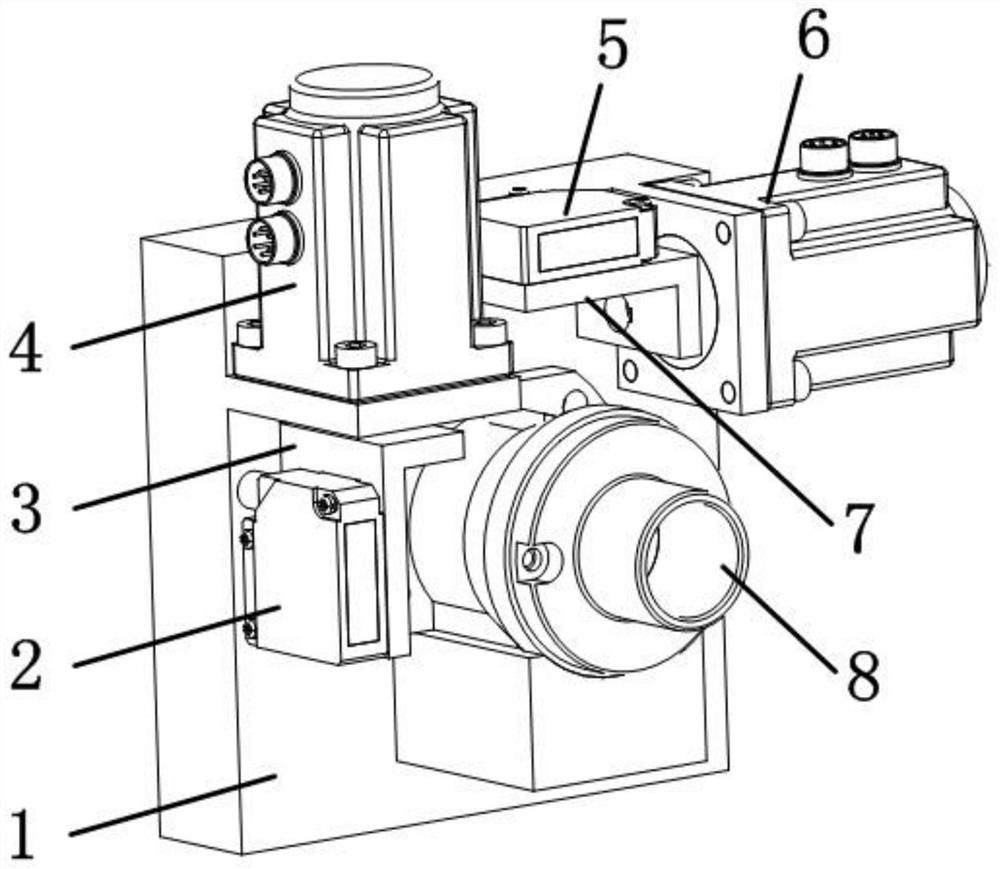
[0080] The present invention also proposes a laser scanning-based robot drilling and riveting normal alignment device, which is used for robot drilling and riveting normal alignment, such as figure 1 As shown, including installation base 1, laser distance sensor S1 2, first sensor mounting plate 3, servo motor B1 4, laser distance sensor S2 5, servo motor B2 6, second sensor mounting plate 7, compression head 8;
[0081] The mounting base 1 is a square flat plate, and the compression head 8 is vertically installed in the center of one side of the mounting base 1, and the same side of the mounting base 1 as the compression head 8 is vertically fixedly connected to the first fixing plate, and the first fixing plate A circular hole is arranged in the center, and the side of the first fixed plate closest to the edge of the installation base 1 is fixedly connected with the servo motor B14, and the main shaft of the servo motor B14 passes through the circular hole of the first fixed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More