Industrial robot trajectory tracking control algorithm
An industrial robot and trajectory tracking technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
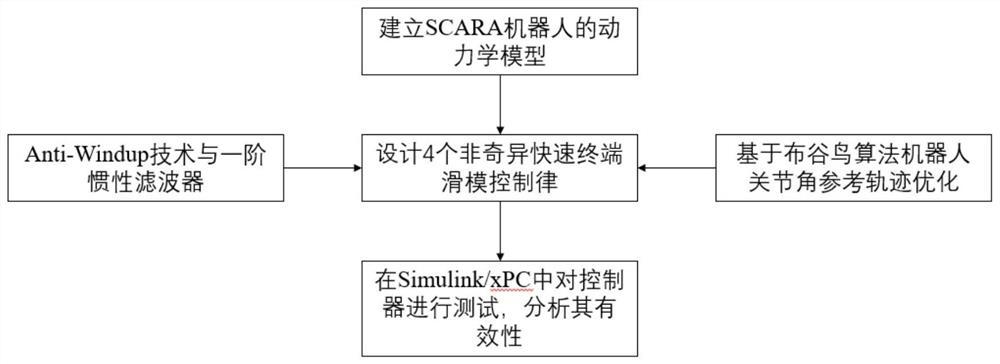
[0050]The invention provides an industrial robot trajectory tracking control algorithm, specifically adopts the industrial robot non-singular terminal sliding mode trajectory tracking control algorithm, including the following steps:
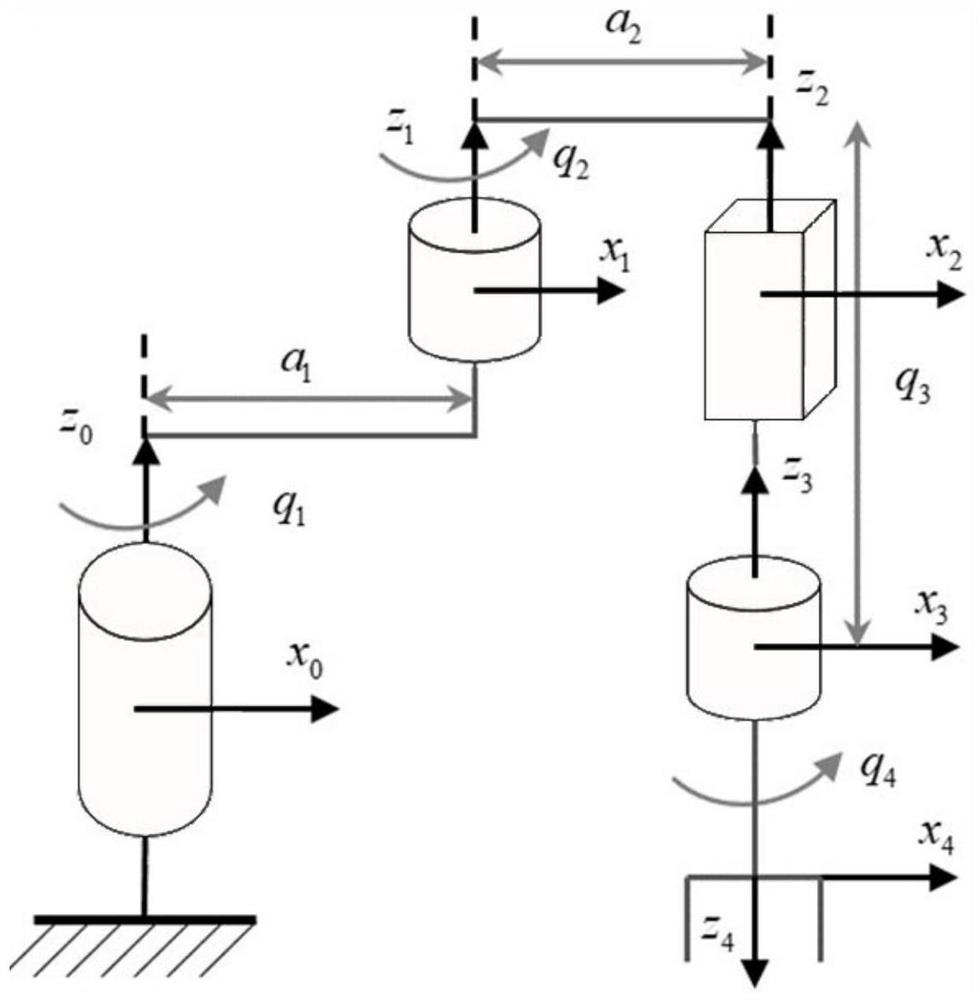
[0051] Step 1: Use the Lagrange equation to obtain the dynamic model of the SCARA four-axis industrial robot:
[0052]
[0053] In the formula, q, and Represent the 4×1 joint variable, joint variable velocity and joint variable acceleration vector; M is the 4×1 inertia matrix; C is the 4×4 Coriolis force and centrifugal force matrix; τ is the 4×1 joint moment; τ d is a 4×1 disturbance moment including joint load, external disturbance, friction moment and unmodeled characteristics; a 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com