A multi-inspection-feature-oriented inspection path planning method
A path planning and path technology, applied in prediction, data processing applications, instruments, etc., can solve problems such as path repetition, repeated trial and error, affecting detection efficiency and quality, and achieve the effect of saving measurement time and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
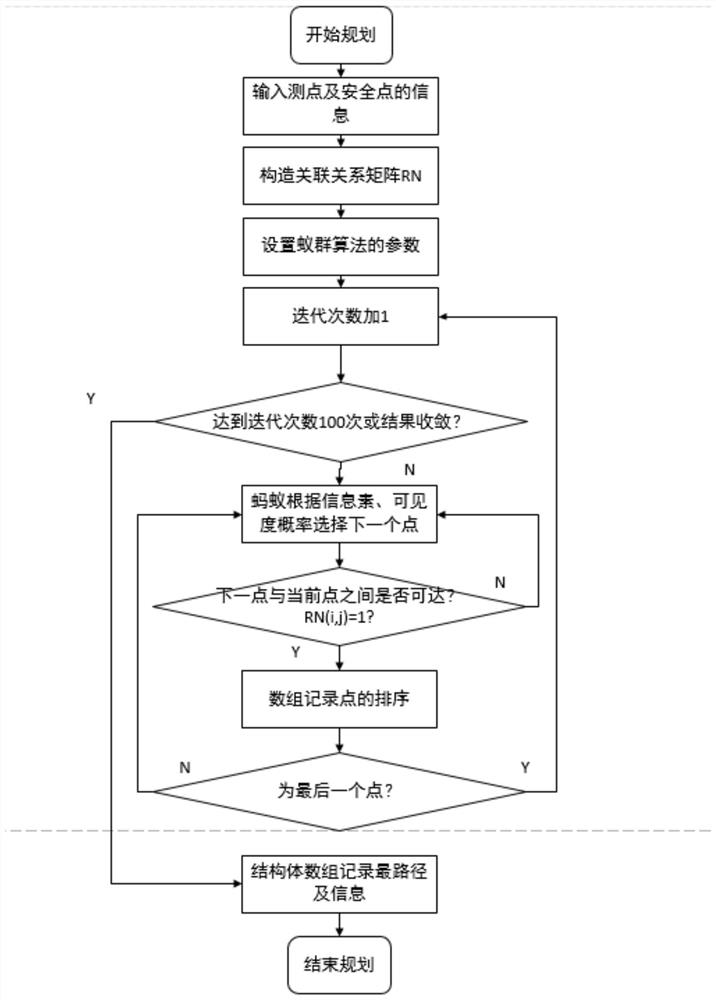
[0036] A detection path planning method for multi-inspection features, such as figure 1 As shown, the specific steps are as follows:
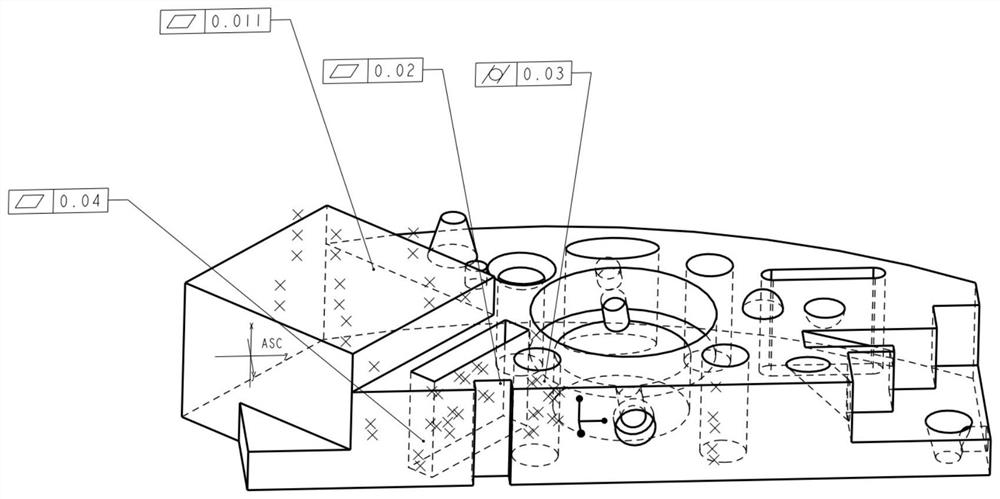
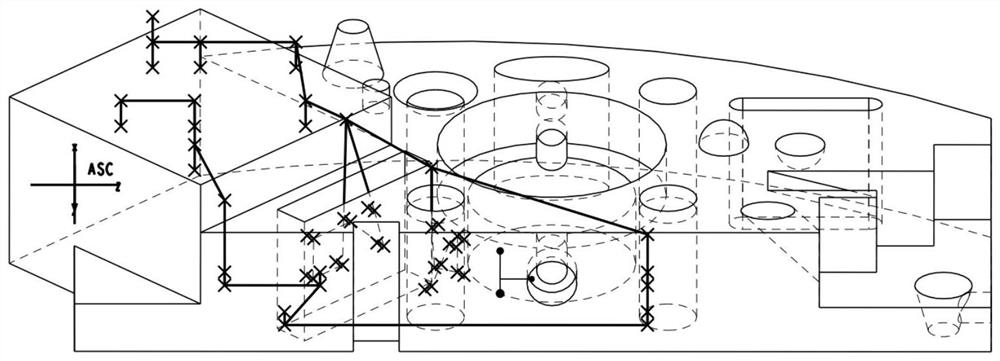
[0037] Step 1: Different from the conventional method of manually adding measuring points and safety points on the model based on the experience of master workers, the present invention detects measuring points and safety points according to the characteristics of geometric features and the requirements of geometric tolerances by analyzing the inspection information on the three-dimensional model. The layout of the safety points, and record the coordinate value, direction vector and identification number of the characteristic of each measuring point, and design the corresponding database table to store the measuring point information. Aiming at the concerned cross-feature detection path planning problem, taking the 3D model TEST_MODEL in Creo2.0 software as an example, the annotations on the model are analyzed, so as to plan the measuring point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More