

Driving prompting method and device for unmanned vehicle
A technology of unmanned vehicles and projection devices, applied in the field of automatic driving equipment, can solve the problems that unmanned vehicles and obstacles cannot be effectively avoided, road congestion, and the driving intention of unmanned vehicles cannot be obtained.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
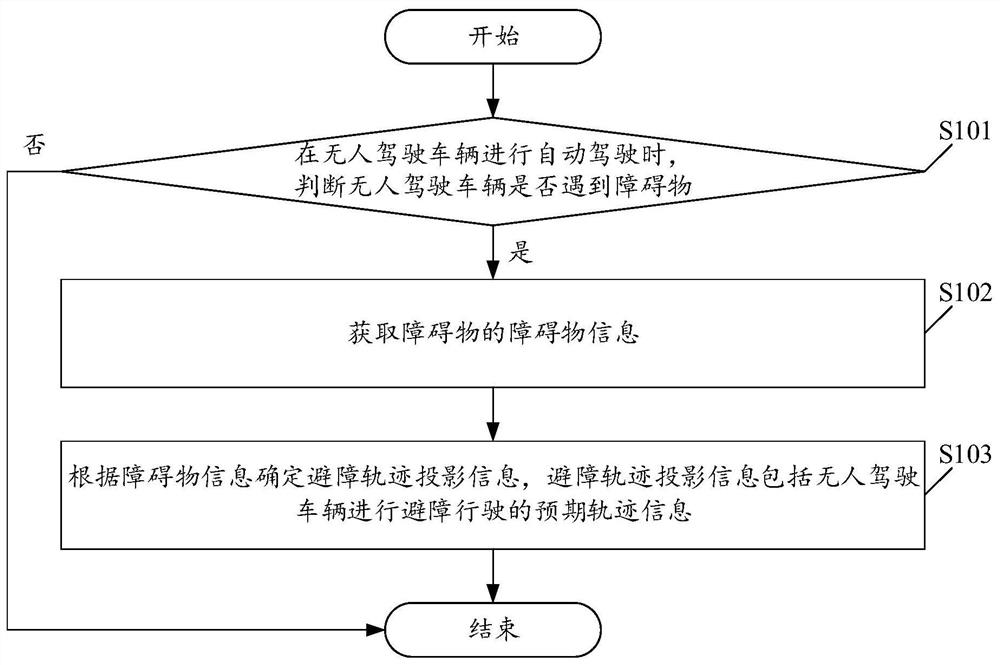
[0051] Please see figure 1 , figure 1 A schematic flowchart of a driving prompt method for an unmanned vehicle is provided for the embodiment of the present application. The application scenarios and application timing of this method. Wherein, the driving prompt method for unmanned vehicles includes:
[0052] S101. When the unmanned vehicle is driving automatically, determine whether the unmanned vehicle encounters an obstacle, if yes, perform steps S102-S103; if not, end the process.
[0053] In this embodiment, unmanned vehicles can be used to represent all intelligent driving vehicles, including at least artificial intelligence driving vehicles.
[0054] In this embodiment, the judging process can be judged by an artificial intelligence automatic driving control chip.
Embodiment approach
[0055] As an optional implementation, the method may also include:
[0056] Obtain the environment detection information during automatic driving, and judge whether the unmanned vehicle has encountered an obstacle based on the image information.
[0057] In this embodiment, an obstacle is used to refer to any object that hinders the driving of the unmanned vehicle, including people.
[0058] In the embodiment of the present application, the above-mentioned environment detection information includes radar detection data, camera detection data, sensor detection data, etc., which is not limited in the embodiment of the present application.
[0059] S102. Obtain obstacle information of the obstacle.
[0060] In this embodiment, the obstacle information includes one or more of obstacle type, obstacle position, and obstacle size.
[0061] In this embodiment, the obstacle information may also include whether the obstacle acts, the obstacle action, and the like.
[0062] S103. Dete...
Embodiment 2
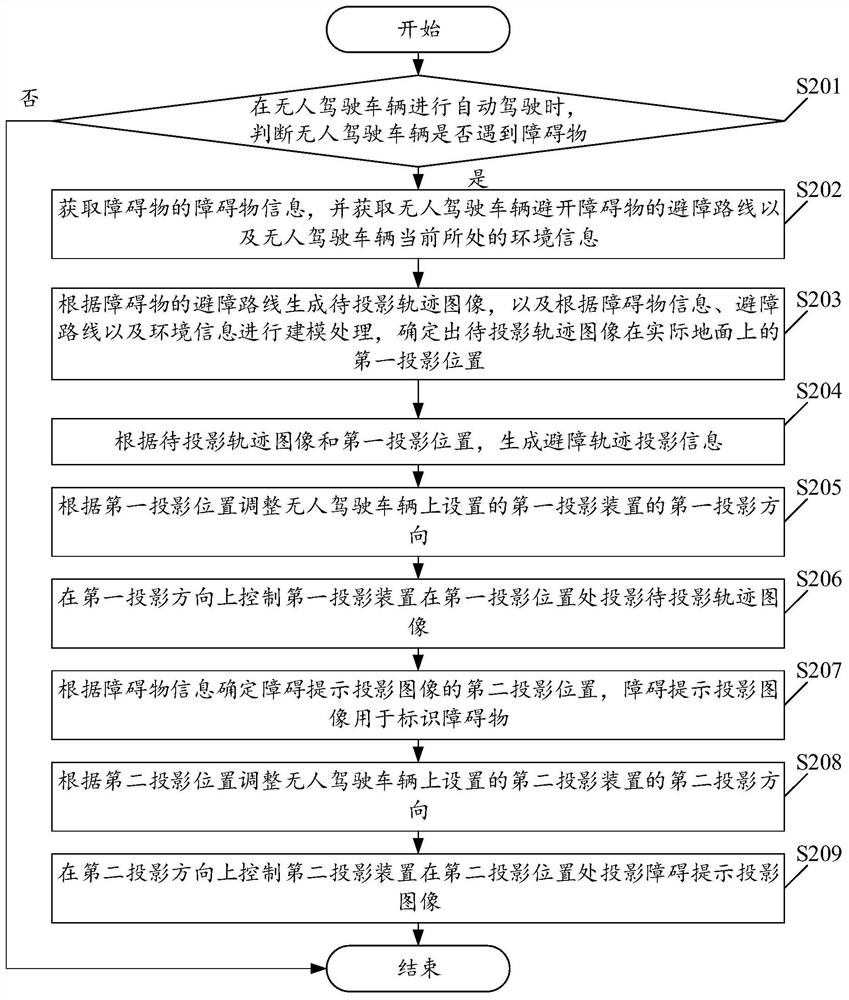
[0067] Please see figure 2 , figure 2 It is a schematic flowchart of another driving prompt method for an unmanned vehicle provided in the embodiment of the present application. figure 2 The flow diagram of the described driving prompt method for unmanned vehicles is based on figure 1 The schematic flow chart of the described driving prompt method for unmanned vehicles is improved. Wherein, the driving prompt method for unmanned vehicles includes:
[0068] S201. When the unmanned vehicle is driving automatically, determine whether the unmanned vehicle encounters an obstacle, if yes, perform steps S202-S209; if not, end the process.
[0069] In this embodiment, unmanned vehicles can be used to represent all intelligent driving vehicles, including at least artificial intelligence driving vehicles.
[0070] In this embodiment, the judging process can be judged by an artificial intelligence automatic driving control chip.
[0071] As an optional implementation, the method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More