

A robot for correcting hand and foot deformities
A robot and deformity technology, applied in the medical field, can solve the problems such as the deformity cannot be well recovered, and the rehabilitation function is not suitable, and achieve the effect of simplified structure, low cost, and reduced patient load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
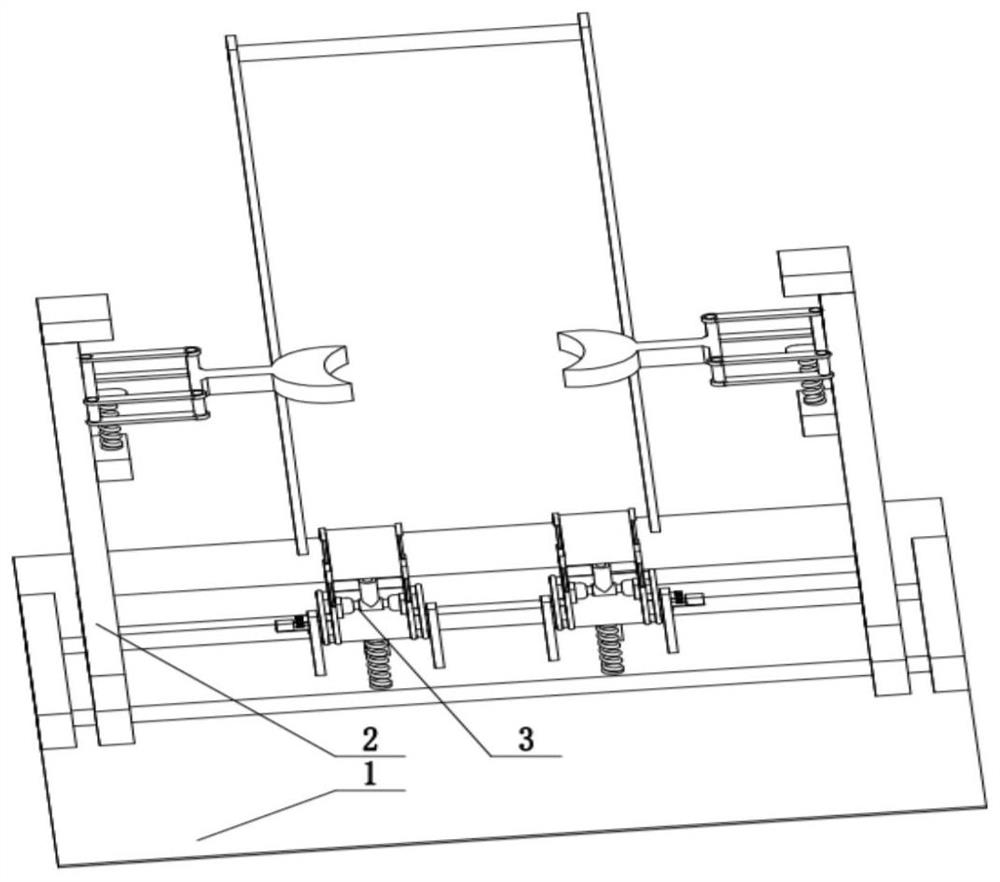
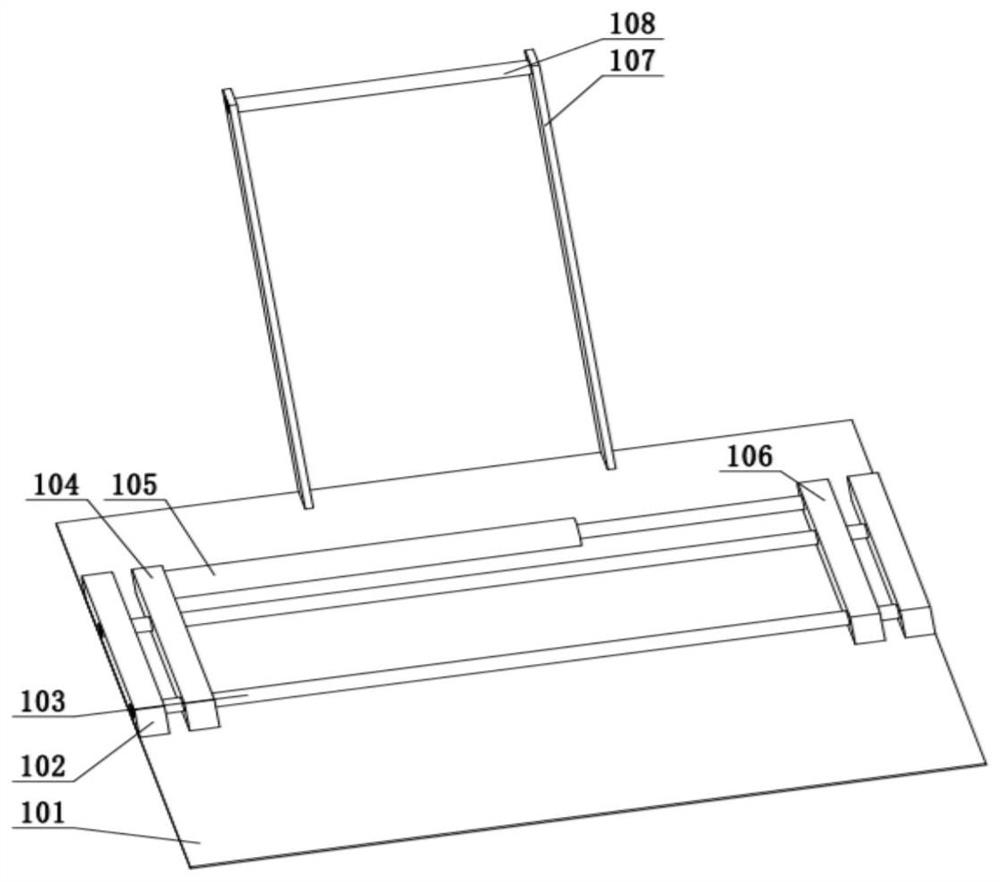
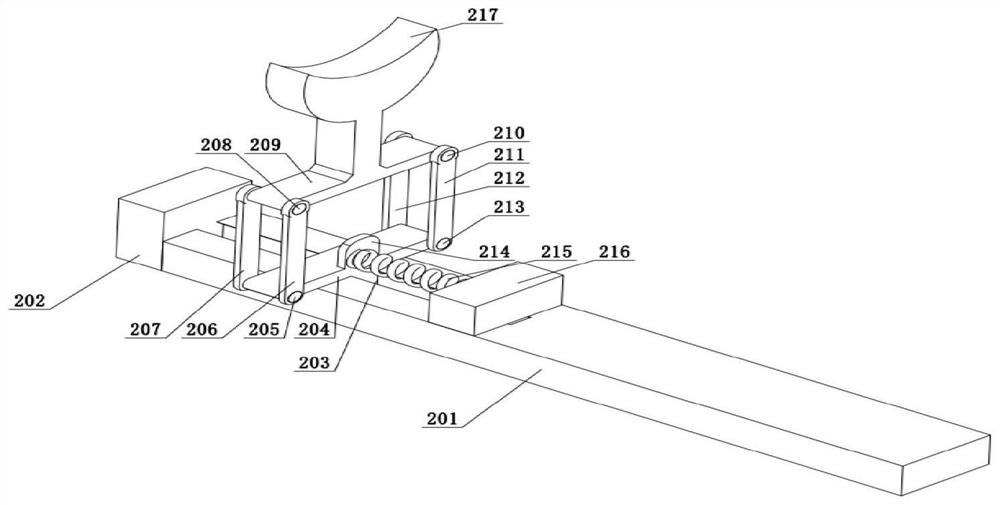
[0026] Example: such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 A robot for correcting deformity of hands and feet shown includes a bottom mechanism 1, a limit mechanism 2, and a movement mechanism 3. The bottom mechanism 1 is fixedly installed on the ground. 105 Adjust the spacing of the limit bracket 201 so that the limit mechanism 2 and the bottom mechanism 1 clamp the patient's leg, and the limit mechanism 2 is fixedly installed on the bottom mechanism 1 to provide the function of limiting the patient's leg and correcting the shape. The movement mechanism 3 Fixedly installed on the bottom mechanism 1, the movement mechanism 3 as a whole provides the function of simulating the normal walking of the patient. With the synergy of the movement motor 303, the ascending cylinder 322, and the angle cylinder 327, the walking function is realized through programming, and the patient can gradually walk through continuous walking. Adapting to normal posture, the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More