

Underwater robot control method and device
A technology of an underwater robot and a control method, which is applied to underwater operation equipment, program-controlled manipulators, manipulators, etc., and can solve problems such as interruption of the work process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
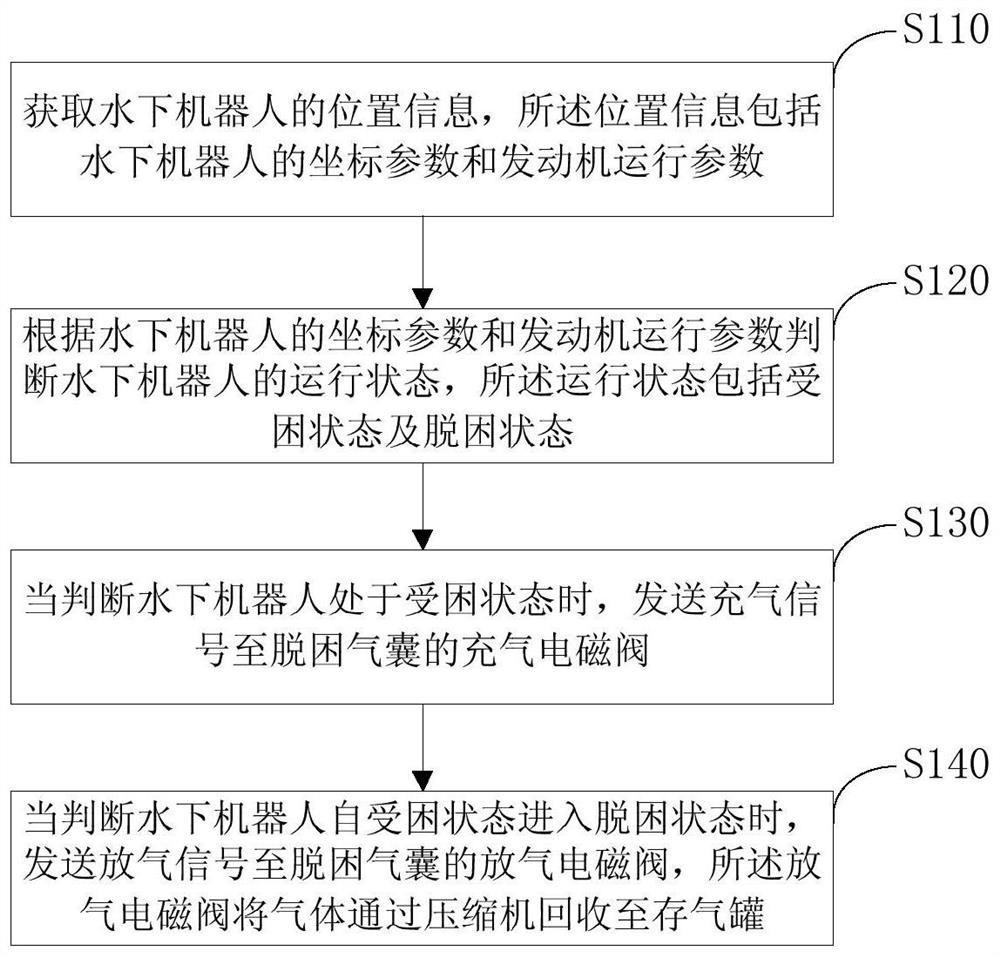
[0030] In order to solve the problem of interruption of the work process caused by the underwater robot directly surfacing to the level after getting out of trouble, this embodiment provides a control method for the underwater robot, such as figure 1 shown, including the following steps:
[0031] S110: Obtain the position information of the underwater robot, where the position information includes coordinate parameters and engine operating parameters of the underwater robot;
[0032] In the control method, the server of the monitoring ship control center on the water surface obtains the position information of the underwater robot, and the method for obtaining the position information includes: a positioning device provided on the underwater robot sends the position information to the server in real time;
[0033] S120: Judging the operating state of the underwater robot according to the coordinate parameters of the underwater robot and the engine operating parameters, the ope...
Embodiment 2
[0040] The present embodiment provides the control method of preferred underwater robot, comprises the steps:
[0041] Obtaining position information of the underwater robot, the position information including coordinate parameters and engine operating parameters of the underwater robot;
[0042]Judging the operating state of the underwater robot according to the coordinate parameters of the underwater robot and the engine operating parameters, the operating state includes the trapped state and the escaped state. When the coordinate parameters of the underwater robot remain unchanged and the engine operating parameters are normal, the underwater The robot is in a trapped state; when the coordinate parameters of the underwater robot change and the engine operating parameters are normal, it is judged that the underwater robot is in a state of escape; the coordinate parameters of the underwater robot include: the three-dimensional coordinates of the underwater robot; The paramete...
Embodiment 3
[0047] The underwater robot control method that the present embodiment provides, comprises the steps:
[0048] Obtaining position information of the underwater robot, the position information including coordinate parameters and engine operating parameters of the underwater robot;
[0049] Judging the operating state of the underwater robot according to the coordinate parameters of the underwater robot and the engine operating parameters, the operating state includes a trapped state and an escaped state;
[0050] When it is judged that the underwater robot is in a trapped state, an inflation signal is sent to the inflatable electromagnetic valve of the escape airbag; the escape airbag includes a first airbag and a second airbag, the first airbag is connected with the first inflation electromagnetic valve, and The second airbag is connected to the second inflation solenoid valve; when it is determined that the underwater robot is in a trapped state, the first branch inflation si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More