

Vehicle distributed steering driving system control method based on reinforcement learning
A technology of reinforcement learning and driving system, applied in neural learning methods, automatic steering control components, steering mechanisms, etc., can solve the problems of failing to take into account the independent corners of four wheels and making full use of tire adhesion, etc., to minimize tires The effect of utilization rate, maximizing tire lateral force, and reducing tire wear degree
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
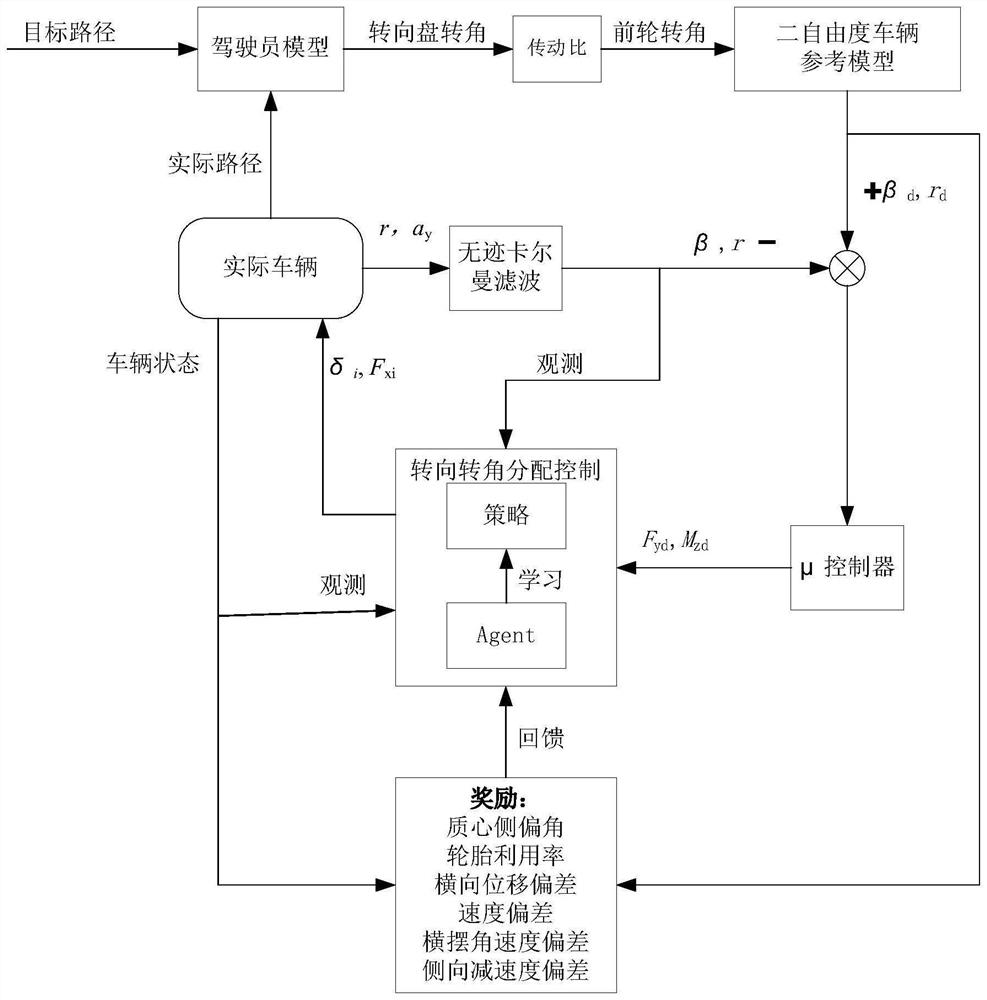
[0058] refer to figure 1 As shown, a kind of vehicle distributed steering drive system control method based on reinforcement learning of the present invention, the steps are as follows:
[0059] 1) Obtain the current state data of the vehicle, including: steering wheel angle, vehicle speed, yaw rate and lateral acceleration;
[0060] The current state data of the vehicle includes: static parameters and dynamic parameters of the vehicle, and the dynamic parameters include: vehicle mass center side slip angle, yaw rate, vehicle speed, lateral acceleration, roll angle, tire lateral force, and tire vertical load.
[0061] 2) According to the yaw rate and lateral acceleration obtained above, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More