

Transformer robotic fish positioning method based on ultrasonic array hyperbolic algorithm
An ultrasonic array and positioning method technology, applied in the field of transformers, can solve the problems of unsatisfactory visual positioning method, attenuation of electromagnetic waves by transformer oil, large memory consumption, etc., and achieve the effect of narrowing the positioning range, real-time positioning, and reducing the amount of data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
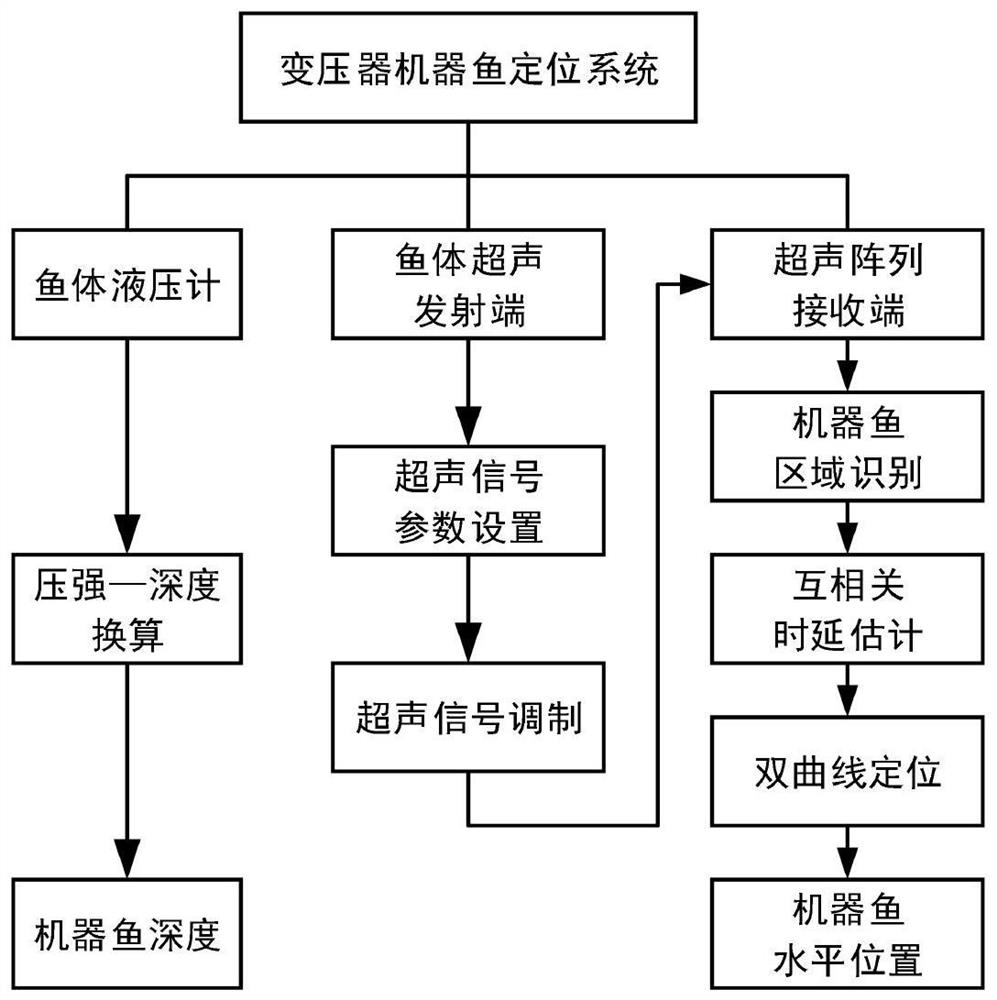
[0038] A transformer robot fish positioning method based on ultrasonic array hyperbolic algorithm, such as figure 1 shown, including the following steps:
[0039] Step 1. Obtain the depth information of the micro robotic fish
[0040] The present invention installs the pressure gauge on the robot fish body, first obtains the pressure information of the measuring point through the pressure gauge, and then uses the formula (1) to calculate to obtain the depth coordinates of the robot fish, where h is the depth of the robot fish, P is the pressure, and ρ is the density of the transformer oil.
[0041]
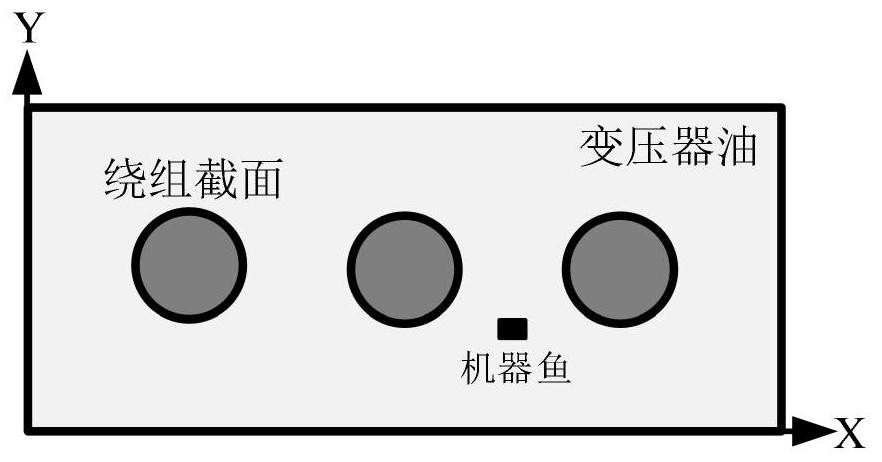
[0042] Step 2. On the premise of knowing the depth information of the micro robotic fish, simplify the 3D positioning model of the micro robotic fish into a 2D positioning model, as shown in figure 2 and image 3 shown.
[0043] In this step, converting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More