

Manipulator for industrial intelligent manufacturing
An intelligent manufacturing and manipulator technology, applied in the field of manipulators, can solve problems such as damage to the workpiece, deformation of the workpiece, damage to the workpiece, etc., and achieve the effect of improving the grasping ability and ensuring stability and uniformity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
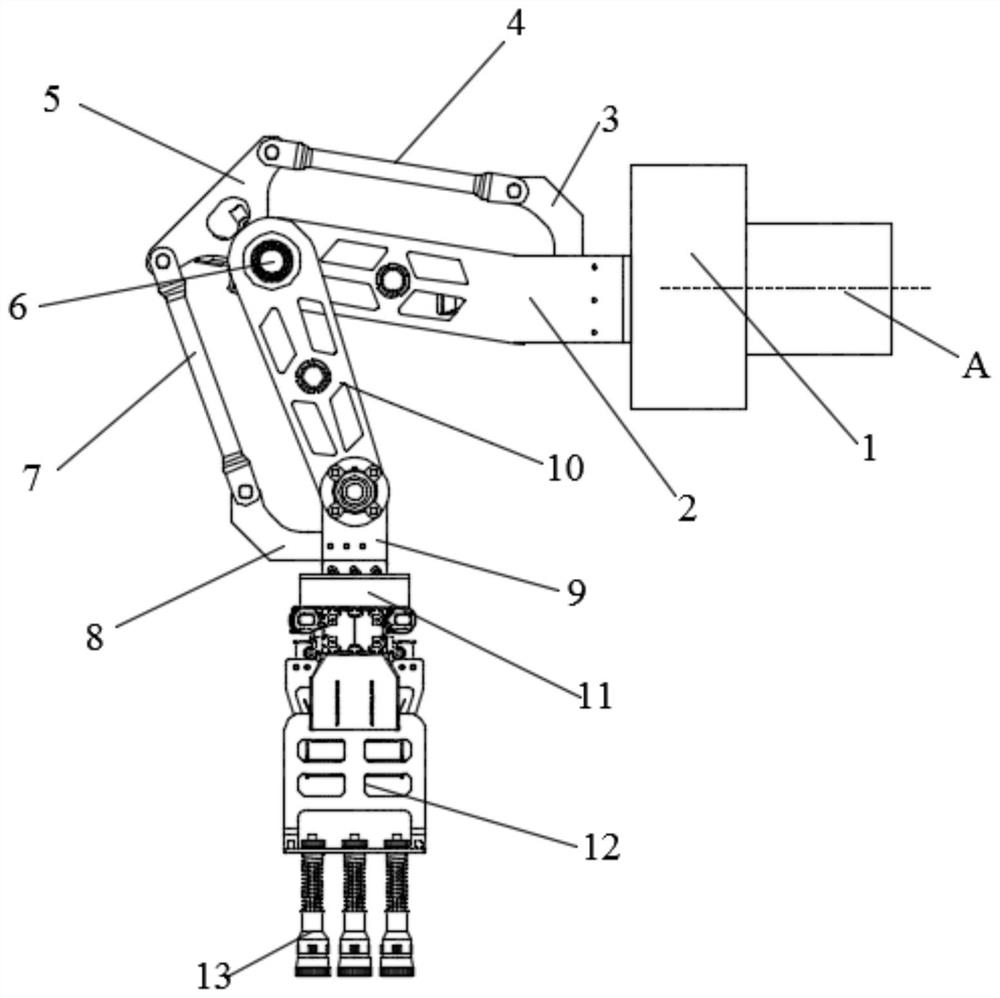
[0023] The following will be combined with Figure 1-5 The present invention is described in detail, and the technical solutions in the embodiments of the present invention are clearly and completely described. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
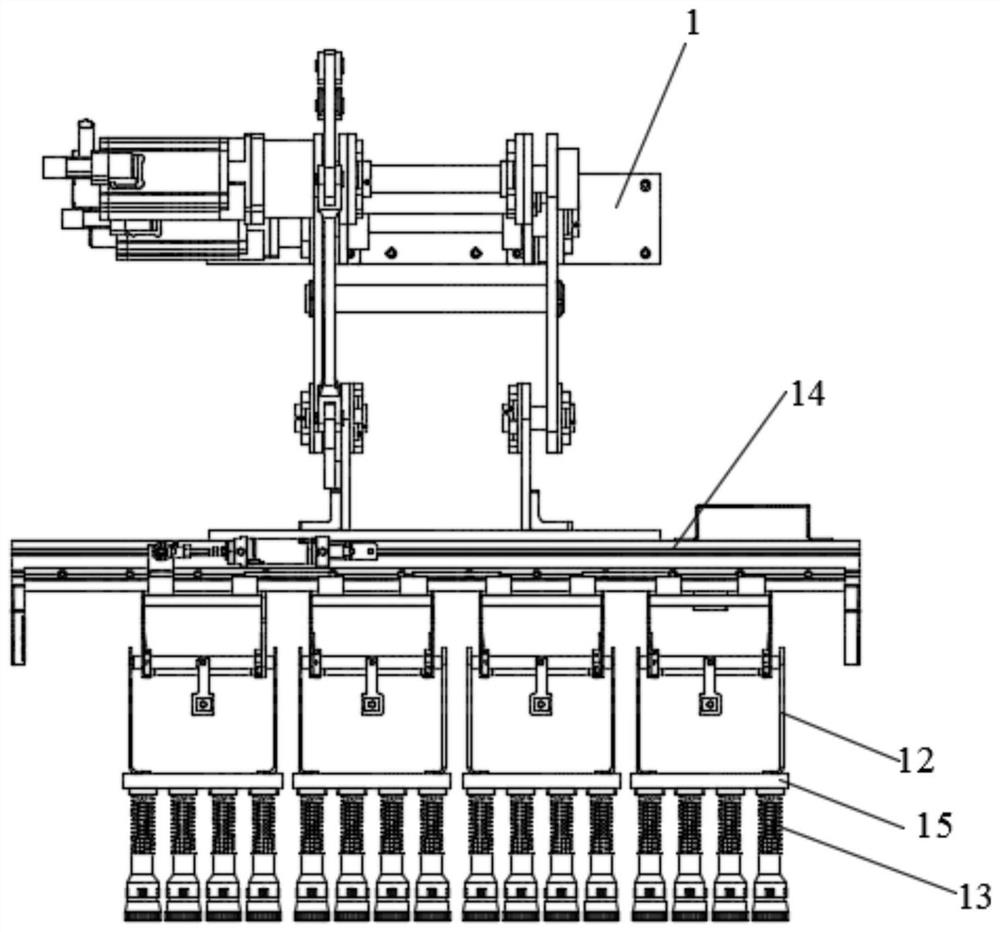
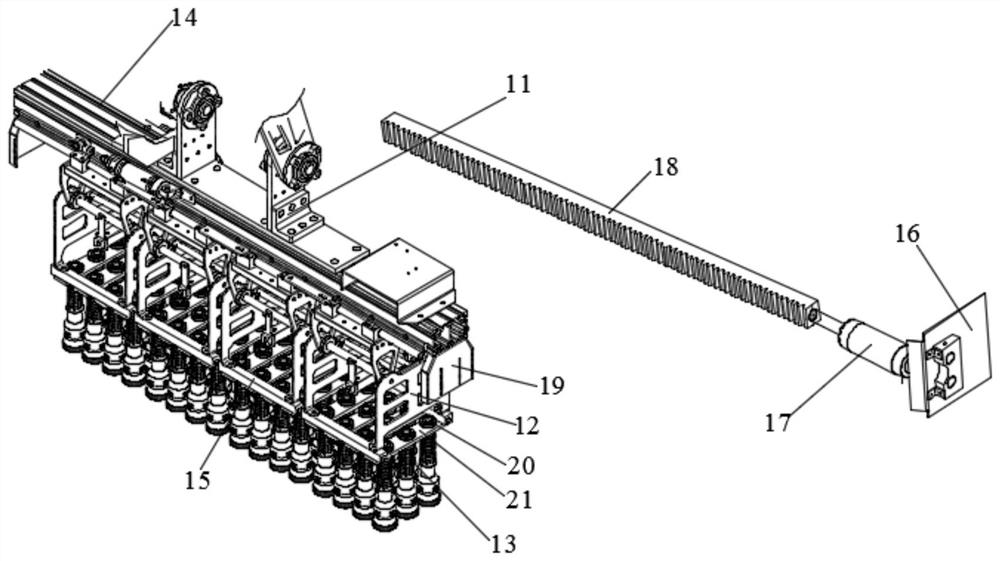
[0024] The present invention provides a manipulator for industrial intelligent manufacturing through improvement, which includes a rotatable mounting plate 1, an attitude-adjusting manipulator mechanism, a connecting seat 11, a manipulator beam 14, a hollow bracket 12 and a suction cup array 13, wherein the The rotatable mounting plate can be installed on the robot arm on which the manipulator is installed to rotate around its central axis A, the at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More