

Triangular crawler-type inspection robot
An inspection robot and triangular crawler technology, applied in the field of robots, can solve the problems of difficulty in manual inspection, low inspection efficiency, and high labor intensity, and achieve high inspection efficiency, convenient inspection methods, and reduced labor. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
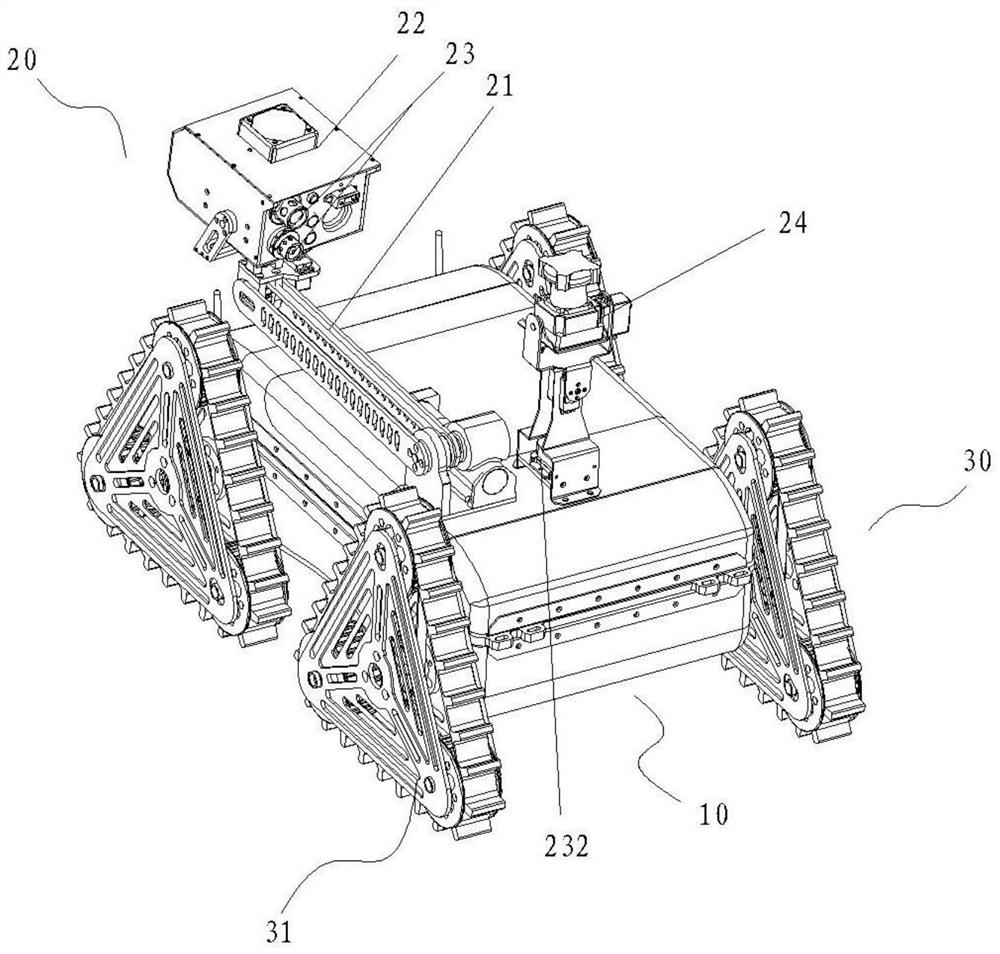
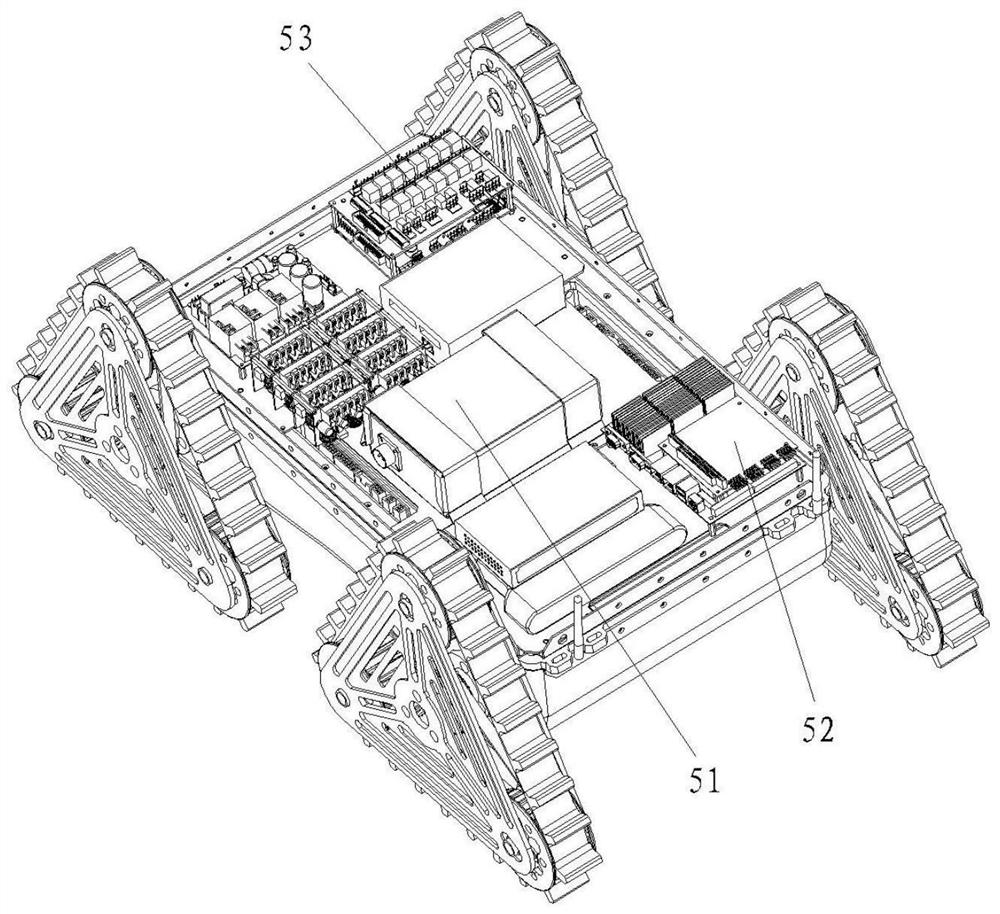
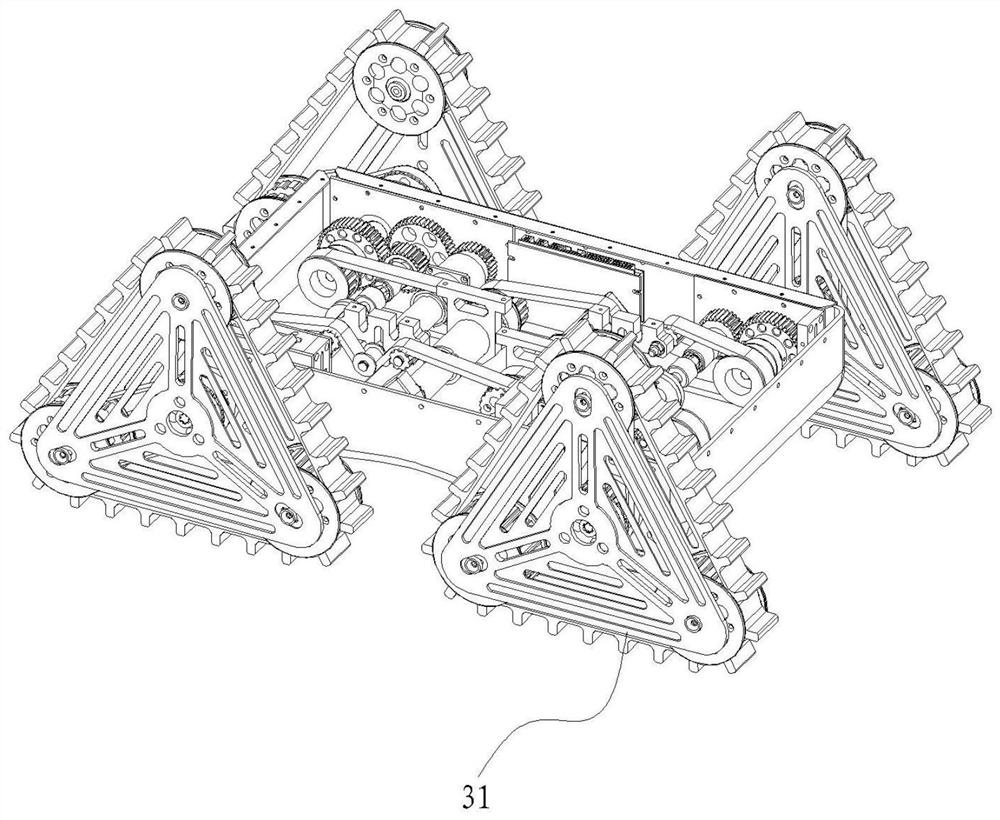
[0028] figure 1 It is a schematic diagram of the overall structure of the present invention; figure 2 Schematic diagram of the layout of the upper layer of the rack; image 3 Schematic diagram of the layout of the lower layer of the rack; Figure 4 Schematic diagram of the power assembly structure; Figure 5 It is a schematic diagram of the top view structure of the power assembly; Figure 6 It is a structural schematic diagram of the walking assembly (30); Figure 7 Schematic diagram of the local structure of the power components figure 1 ; Figure 8 Schematic diagram of the local structure of the power components figure 2 ; Figure 9 It is a schematic diagram of the structure of the mechanical arm;
[0029] As shown in the figure: the triangular crawler-type inspection robot of this embodiment includes a frame 10, a walking device and a sensing device 20, and the sensing device is installed on the frame for sensing the external environment. There are at least two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More