Template matching vision and inertia combined odometer based on sliding window optimization
A template matching and sliding window technology, applied in the field of navigation, can solve problems such as large amount of calculation, inability to be unstable in care, etc., and achieve the effect of improving robustness, improving real-time positioning, and improving robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The drawings constituting a part of the present invention are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
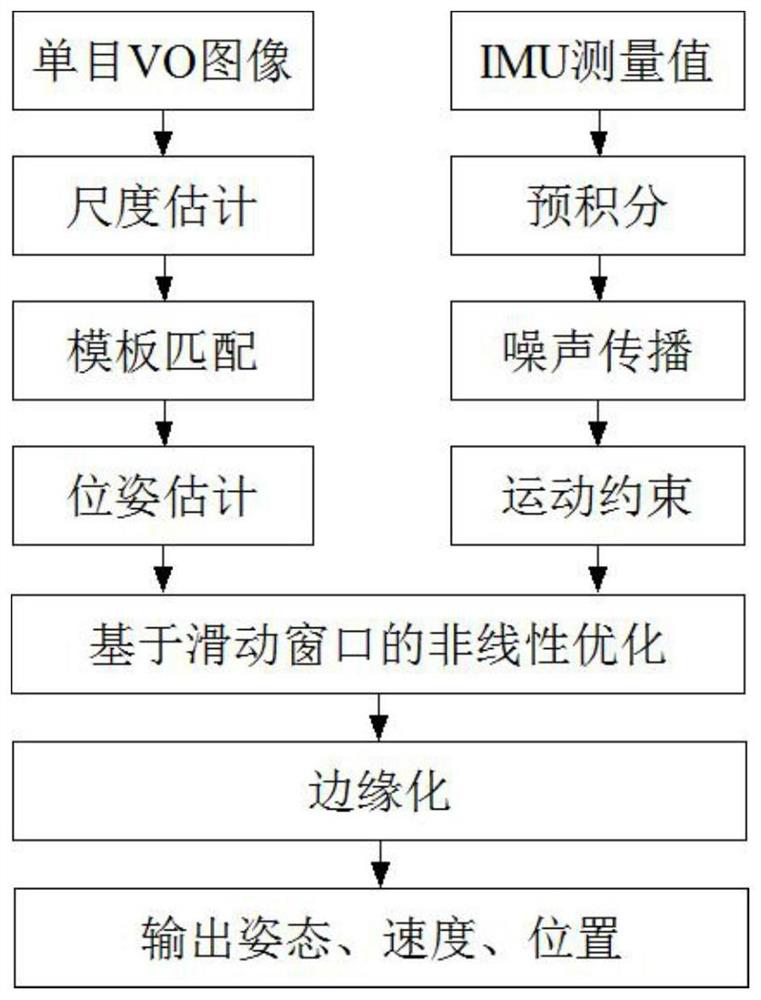
[0033] Such as figure 1 As shown, this embodiment provides a template matching visual and inertial odometry based on sliding window optimization. The visual part calculates the visual residual through the template matching algorithm, and the IMU part obtains the inertial residual through pre-integration calculation. The backend calculates an optimal pose estimation value through the L-M algorithm, so that the sum of the visual residual and the inertial residual is the smallest. Specifically:
[0034] Step 1: Install the sensor and initialize the external parameters. A top-down monocular camera VO and an inertial sensor IMU are installed on the carrier platfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com