AGV laser navigation multilateral positioning method
A technology of multilateral positioning and laser navigation, which is used in surveying and navigation, re-radiation of electromagnetic waves, measuring devices, etc., and can solve problems such as low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be described in further detail below in conjunction with the accompanying drawings.
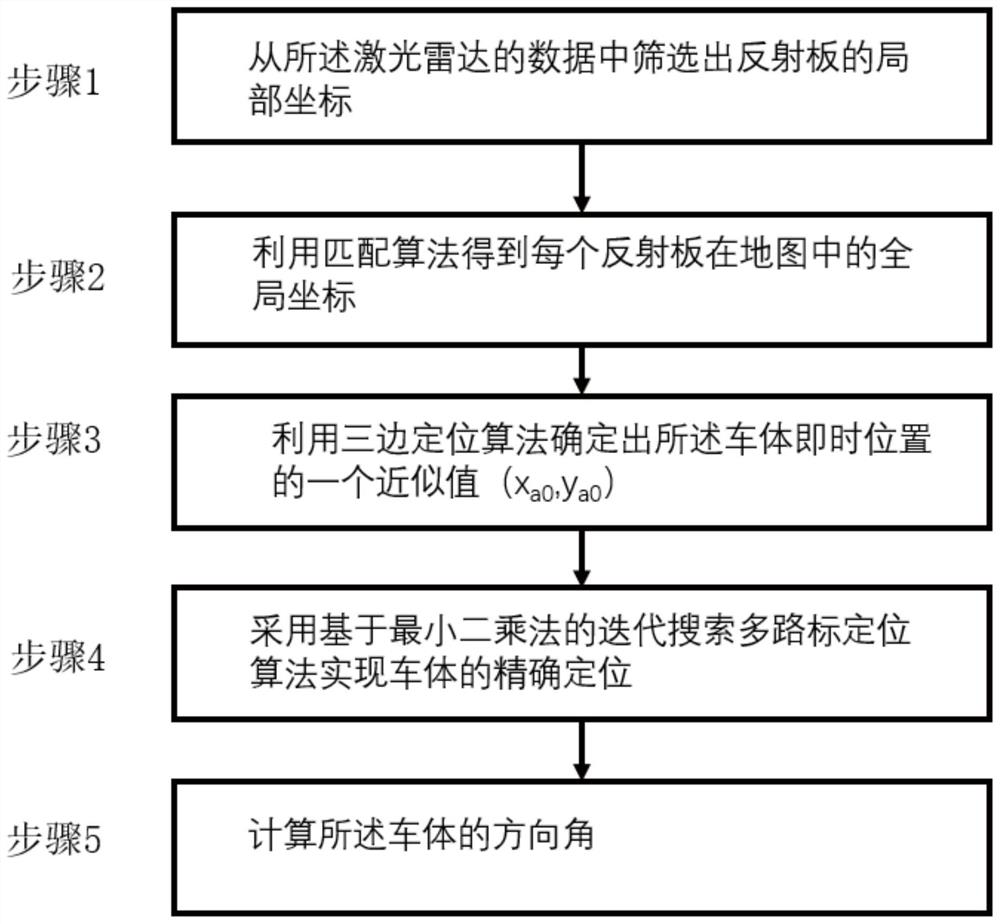
[0071] Such as figure 1 Said, an AGV laser navigation multilateral positioning method, including car body, laser radar and at least three reflectors, including the following steps:
[0072] Step 1: Filter out the local coordinates of the reflector from the lidar data:
[0073] Step 2: Use the matching algorithm to obtain the global coordinates of each reflector in the map:
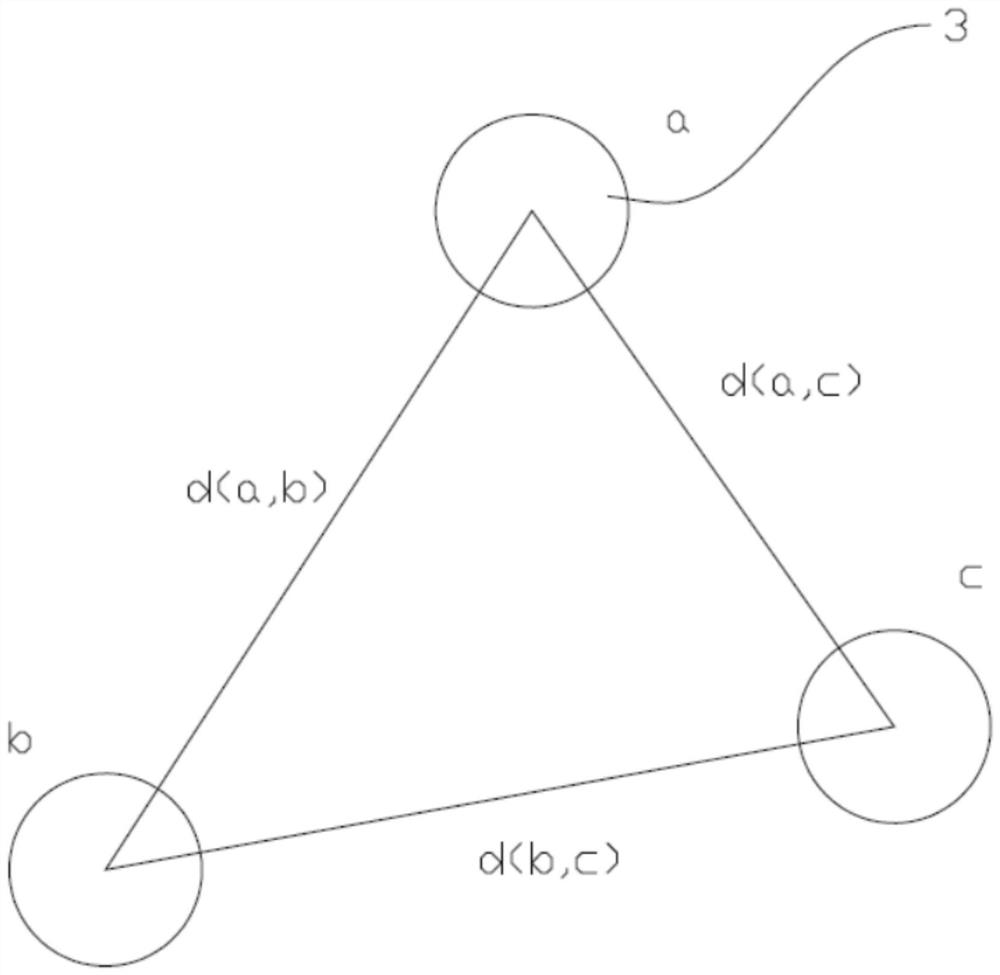
[0074] Step 3: Utilize the trilateral positioning algorithm to determine an approximate value (x a0 ,y a0 ):
[0075] Step 4: Use the iterative search multi-landmark positioning algorithm based on the least square method to realize the precise positioning of the vehicle body:
[0076] Step 5: Calculate the orientation angle of the car body.
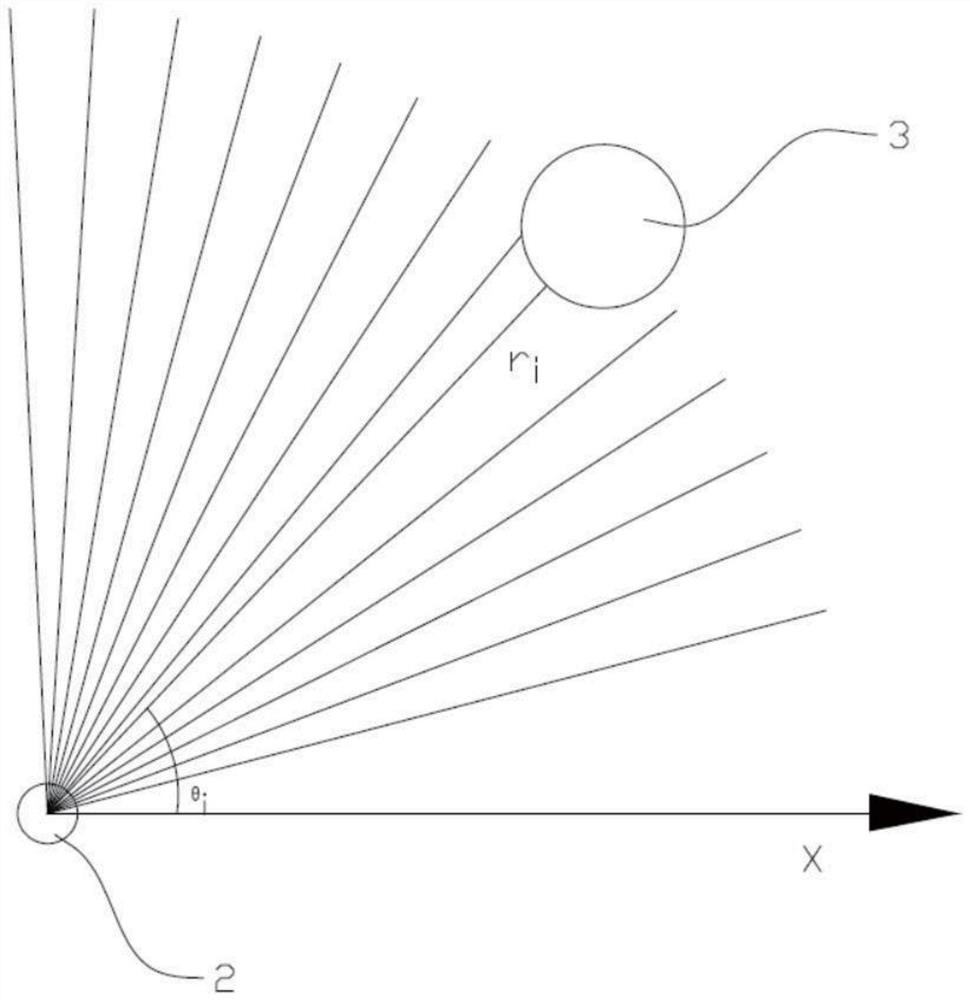
[0077] Such as figure 2 As shown, the above step 1 includes: the reflector adopts a cylindrical reflector with a diameter of D, and the las...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com