

Autonomous underwater robot recovery docking foreground view field three-dimensional reconstruction stereo matching method
An underwater robot, three-dimensional reconstruction technology, applied in the field of robotics, can solve the problems of low matching accuracy, slow matching speed, weak underwater image texture, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
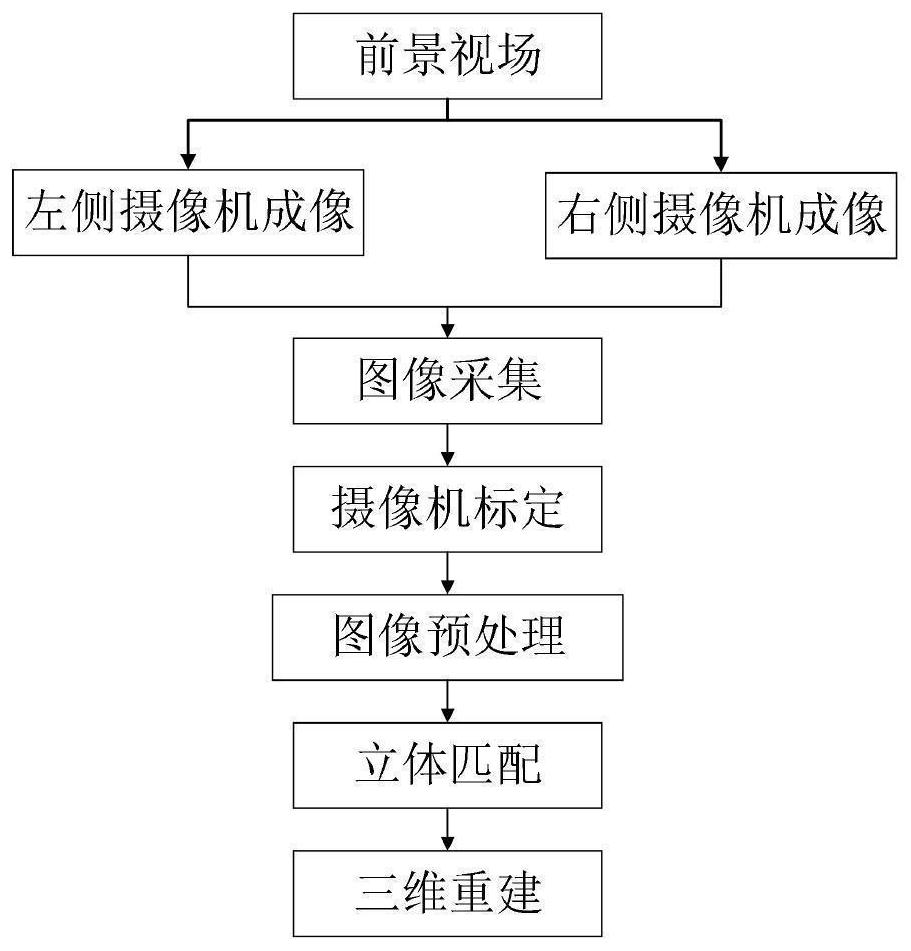
[0066] Such as figure 1 Shown, the object of the present invention is achieved through the following steps:
[0067] 1. Collect left and right camera images, use Zhang’s plane calibration method to calibrate the underwater camera, and obtain the camera’s internal parameter matrix, distortion coefficient matrix, intrinsic matrix, fundamental matrix, rotation matrix and translation matrix, providing parameters for the final 3D reconstruction;
[0068] 2. Use the image processing method based on the Lab color model to preprocess the collected binocular images, reduce the impact of water on light imaging, eliminate the impact of underwater refraction on imaging, and obtain the corresponding image in the air;
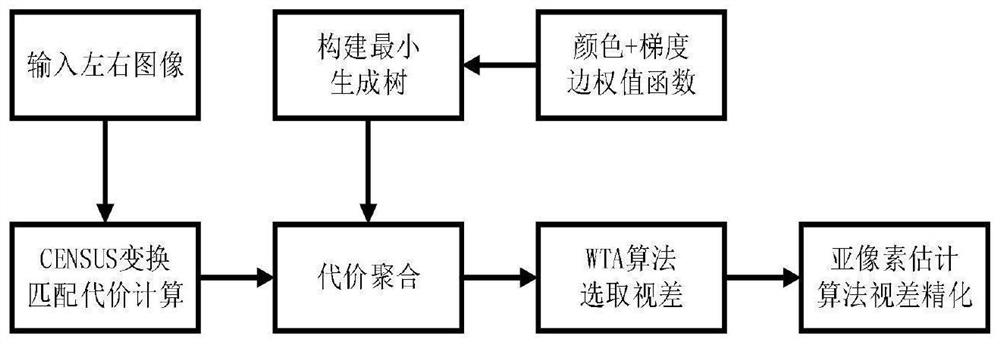
[0069] 3. If figure 2 As shown, the stereo matching method for 3D reconstruction of the foreground field of view of autonomous underwater...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More