Robot cleaning method and device, robot and storage medium
A robot and cleaning technology, applied in the field of robots, can solve the problems of unfavorable cost saving, time-consuming, and low cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0071] Figure 1-a It is a schematic flow chart of the robot cleaning method provided in Embodiment 1 of the present application, which may include the following steps:
[0072] S101: Determine the moving direction of the robot.
[0073] The robot's motion direction is the current motion direction of the robot, which can be the initial motion direction after the robot is turned on, or the motion direction of the robot at a certain moment after the startup. It depends on the situation and will not be done here. Many restrictions.
[0074] In one embodiment, the moving direction of the robot can be determined jointly according to the information of the robot and the information of the area to be cleaned.
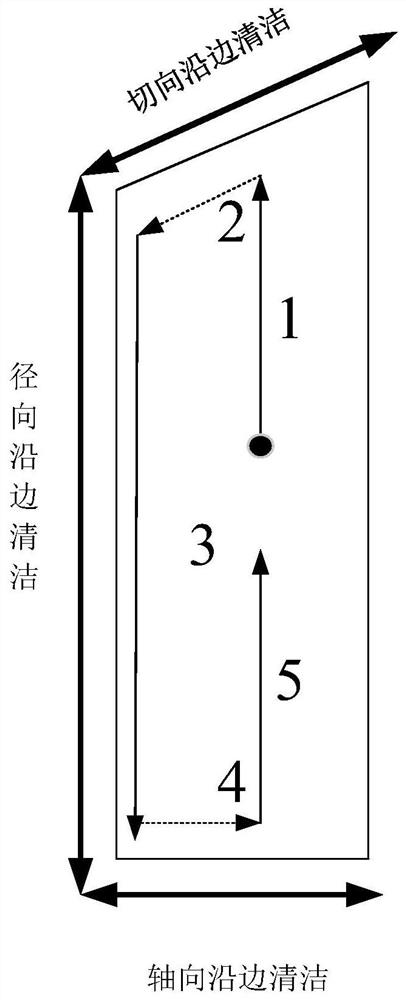
[0075] S102: Perform bow-like cleaning on the area to be cleaned along the movement direction.
[0076] Among them, the bow-like cleaning includes radial cleaning in the area and edge cleaning at the edge of the area. Radial cleaning is cleaning in the area along the longitu...
Embodiment 2
[0084] Figure 2-a The schematic flowchart of the robot cleaning method provided in Embodiment 2 of the present application is a refinement and description of step S102 in Embodiment 1 above. The method may include the following steps:
[0085] S201: Determine the moving direction of the robot.
[0086] Wherein, the above step S201 is the same as the step S101 in the first embodiment, and its specific implementation process can refer to the description of the step S101, which will not be repeated here.
[0087] S202: When cleaning the area to be cleaned along the movement direction, if the movement reaches the preset position of the inner edge of the area to be cleaned, then according to the cleaning conditions on the left and right sides of the robot, determine the next moment of movement of the robot, along the The movement direction at the next moment is to clean the remaining areas to be cleaned in the area to be cleaned.
[0088] Wherein when the area to be cleaned is a...
Embodiment 3
[0109] Figure 3-a The schematic flowchart of the robot cleaning method provided in Embodiment 3 of the present application is another refinement and description of step S102 in Embodiment 1 above. The method may include the following steps:
[0110] S301: Determine the moving direction of the robot.
[0111] Wherein, the above step S301 is the same as the step S101 in the first embodiment, and its specific implementation process can refer to the description of the step S101, which will not be repeated here.
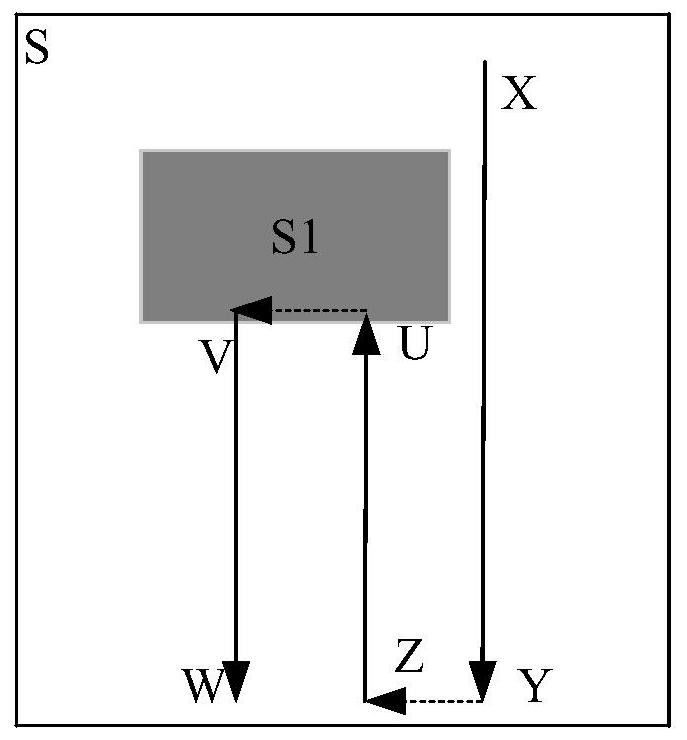
[0112] S302: When cleaning the area to be cleaned along the movement direction, if a preset type of obstacle is detected, after cleaning the preset type of obstacle along the preset direction, clean the area along the current radial direction Continue to clean the remaining areas in the area to be cleaned in the direction to be cleaned.
[0113] The preset direction is used to indicate that the second position and the first position of the robot are both in the current...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More