

Variable-speed dynamic lane changing track planning method based on vehicle driving rule
A technology for vehicle driving and trajectory planning, which is applied in the field of dynamic lane change trajectory planning for variable speeds, and can solve problems such as dangerous vehicle driving, uncomfortable driving, control tracking errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0058] The present invention provides a dynamic lane-changing trajectory planning method based on vehicle driving rules, comprising the following steps:
[0059] Step S1, according to the real-time environment information around the vehicle, determine whether the vehicle is changing lanes or keeping lanes, and if changing lanes, perform step S2;
[0060] Step S2, determining the iterative interval of the lane change program;
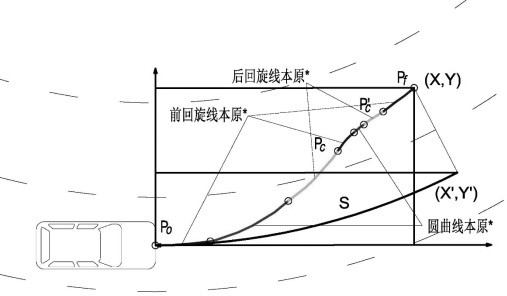
[0061] Step S3, initialize the longitudinal and lateral acceleration and longitudinal jerk for lane change, set the initial state and target state of the self-driving vehicle, and use the circular curve primitive in the shifting state * , Clothoid original * Generate trajectories and calculate the safe distance to avoid collisions;
[0062] Step S4, the trajectory end point is within the safety distance, adjust t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More