

Long-distance water conveyance tunnel underwater inspection robot and method
A technology for inspection robots and long-distance water delivery, which is applied to underwater operation equipment, instruments, transportation and packaging, and can solve problems such as high cable costs, shaking, and robots without fixed devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings.
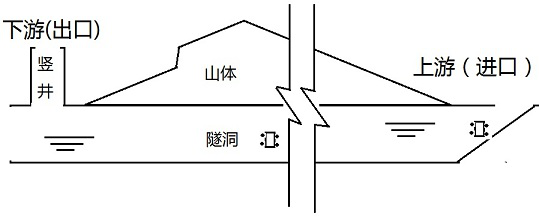
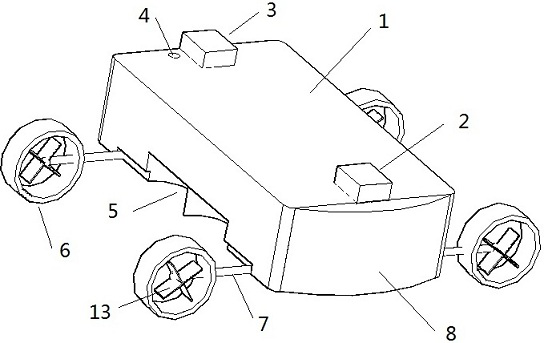
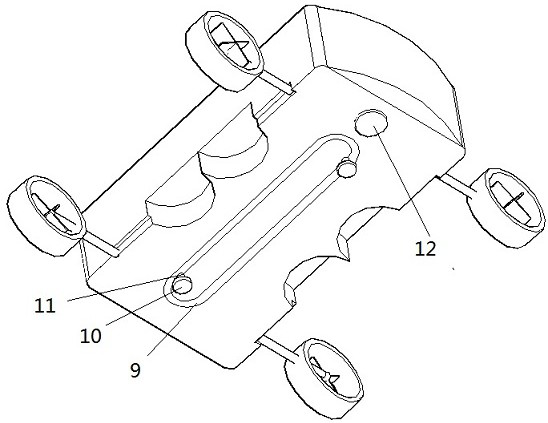
[0038] Such as Figure 1 to Figure 5 As shown, the invention includes 2 sets of underwater inspection robots, the inlet is upstream, connecting channels, the outlet is downstream, and the outlet is a vertical shaft.
[0039] Stick the two devices on the wall of the entrance slope, and the two devices crawl into the water through artificial wireless control, showing a front and a rear distribution.
[0040] The previous device adjusts its posture, scans the surrounding tunnel walls through the front window 8, and connects to the latter device to obtain positioning information, which is stored as inspection data; if it is judged that the tunnel wall is not defective, the latter device moves downstream and surpasses the front one. device, repeat the scanning process, and the two devices run back and forth in sequence. If a wall defect is found, the previous device sinks...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More