Multi-target track extraction method based on Gaussian mixture probability hypothesis density filter
A technology of Gaussian mixture probability and hypothesis density, applied in the field of multi-target tracking, can solve the problem of filter performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0067] The effect of the present invention is further verified and illustrated by the following simulation.
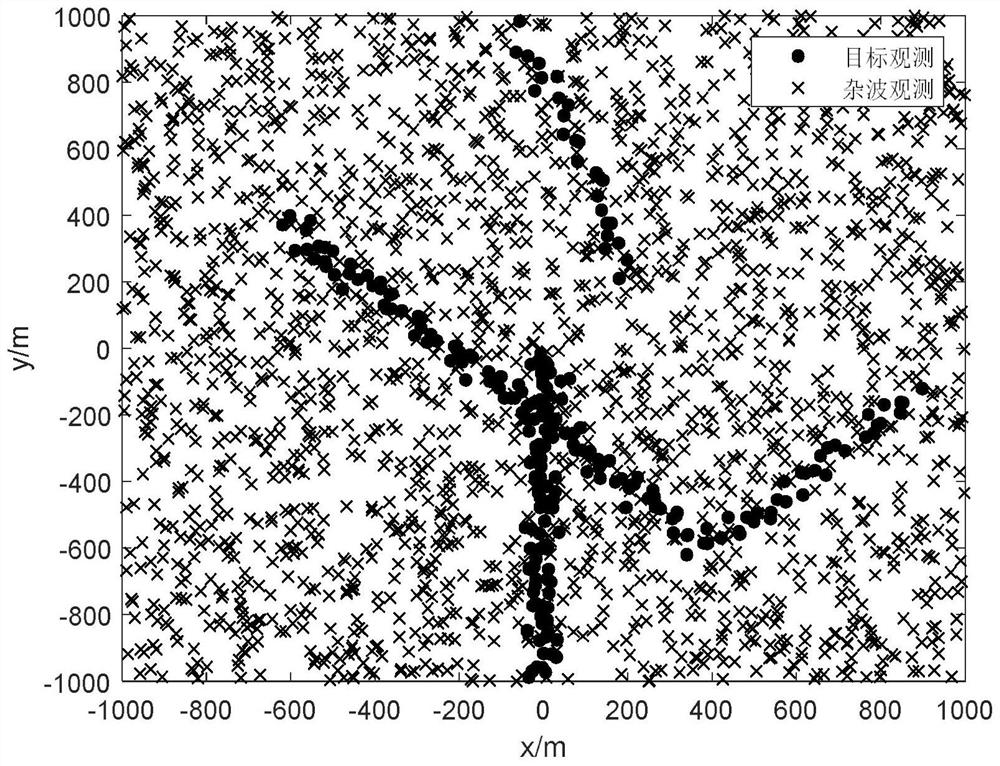
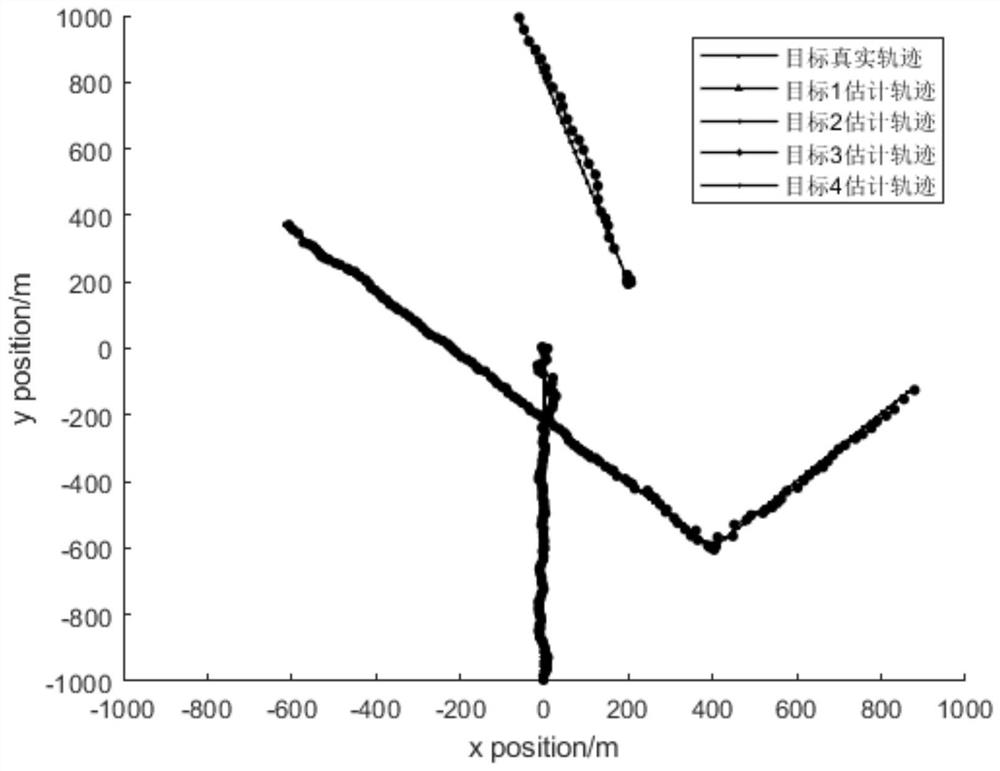
[0068] This simulation environment is built in a two-dimensional plane monitoring area [-1000, 1000]×[-1000, 1000], and the number of targets in this monitoring area is unknown and changes with time. The sensor is located at the point (0,0) in the plane, and its field of view is the monitoring area, and there are clutter and missed detection of the sensor. For simplicity, this paper does not consider the case of derivative targets.
[0069] The state of the target is Where (x, y) is the position of the target, for the target speed. The survival probability P of the target at time k S,k = 0.99. The motion of the target satisfies the CV model, then the target state transition matrix and the process noise covariance matrix are respectively
[0070]
[0071] Among them, the sampling period T=1s, σ v =0.2m / s 2 is the standard deviation of the process noise.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com