Dynamic local path planning method and system
A local path planning and dynamic technology, applied in the field of robotics, can solve problems such as the inability to consider the attitude of the car at the end of the planned path, many turning points in the final path, and fuzzy logic algorithms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0050] This embodiment provides a path planning method and system for automatically inserting and removing irregular goods by a forklift. Further, the hardware of the system mainly includes: a forklift, a computer, and a camera. It should be noted that the obstacle avoidance module includes but is not limited to vision sensors.
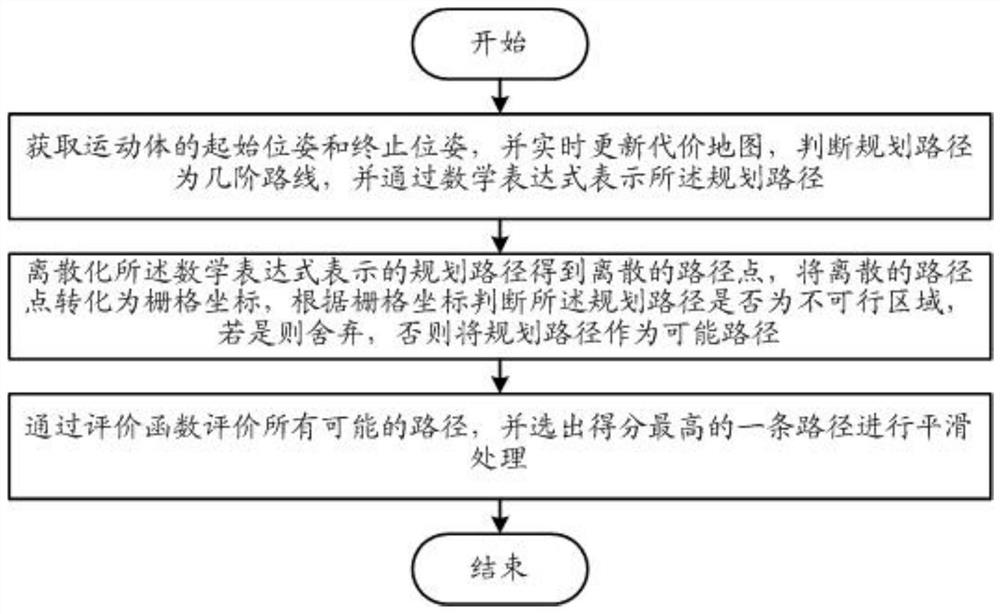
[0051] Such as figure 2 As shown, the dynamic local path planning method specifically includes the following steps:
[0052] Step 1: Obtain the starting pose, ending pose and real-time updated cost map, judge the route of the planned route, and express the route with mathematical expressions.
[0053] When judging the planned route is a few-order route, the first-order path analysis is performed first:
[0054] I. Judging the order of the path
[0055] 1.1 First judge whether d1 and d2 meet the constraint condition d1>R min And d2>R min ;
[0056] In this embodiment, d1=(x v +R min ) 2 +y v 2 ,d2=(x v +R min ) 2 +y v 2 ,Such as imag...
Embodiment 2
[0079] This embodiment provides a path planning method and system for reversing into a warehouse. Furthermore, the hardware of the system is mainly composed of: one car, one industrial computer, and several laser radars.
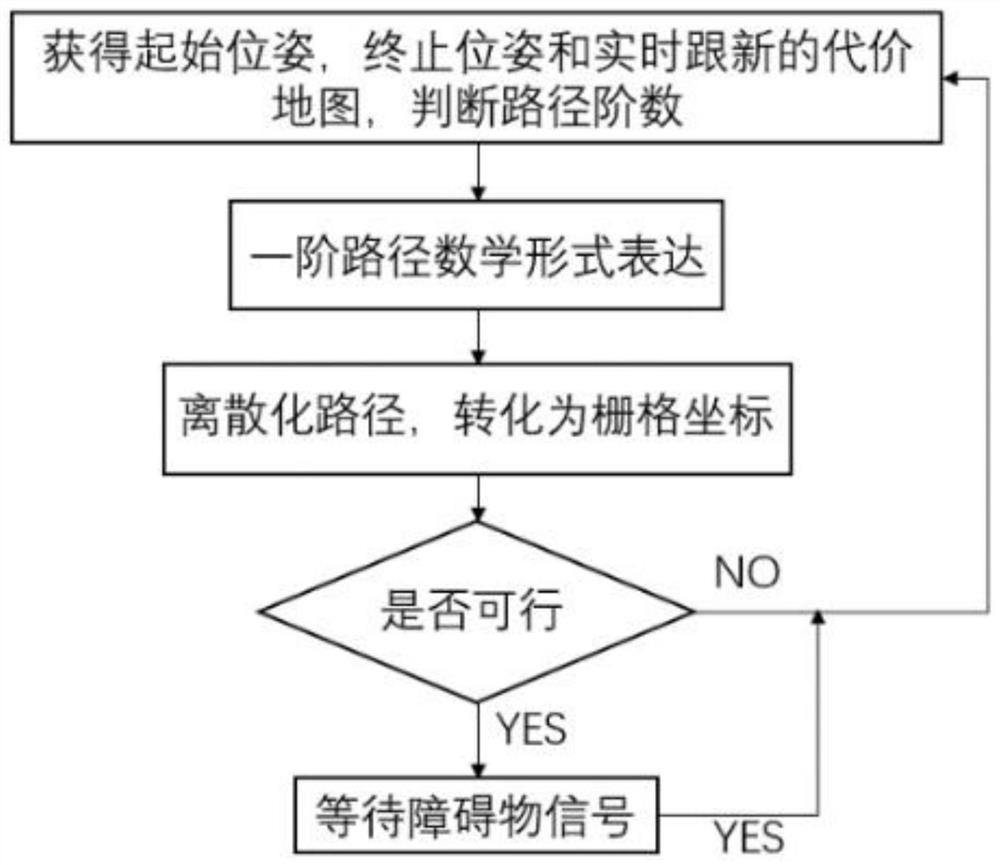
[0080] Such as Figure 4 As shown, the dynamic local path planning method specifically includes the following steps:
[0081] Step 1: Obtain the starting pose, ending pose and real-time updated cost map, judge the route of the planned route, and express the route with mathematical expressions.
[0082] When judging the planned route is a few-order route, the first-order path analysis is performed first:
[0083] I. Judging the order of the path
[0084] 1.1 First judge whether d1 and d2 meet the constraint condition d1>R min And d2>R min ;
[0085] In this embodiment, d1=(x v +R min ) 2 +y v 2 ,d2=(x v +R min ) 2 +y v 2 ,Such as Figure 5 As shown, d1 and d2 represent the current position of the car to (R min ,0) and (-R min ,0) distance, (...
Embodiment 3
[0124] This embodiment provides an embodiment of a three-order path.
[0125] If the path is a third-order path, it means that the position of the moving body does not meet the constraint conditions at this time, and d1min or d2min , it is necessary to find another arc that can be tangent to the second-order route and satisfy the third-order path constraints.
[0126] Third-order path constraints: Among them, θ 3 It is the angle turned by the third section of the arc. RRR type indicates that the first section of the path is clockwise, the second section of the path is clockwise, and the third section of the path is clockwise; LRR type indicates that the first section of the path is counterclockwise, and the second section of the path is clockwise. The second path is clockwise, the third path is clockwise; the RLR type indicates that the first path is clockwise, the second path is counterclockwise, and the third path is clockwise; the LLR type indicates that the first path is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More