

Unmanned aerial vehicle safety control method under expected trajectory signal attack
A technology of expected trajectory and safety control, which is applied in the field of UAV safety control, and can solve the problems that the estimation accuracy of learning observer depends on the learning time interval, and there is no analysis and transmission mechanism attack impact modeling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
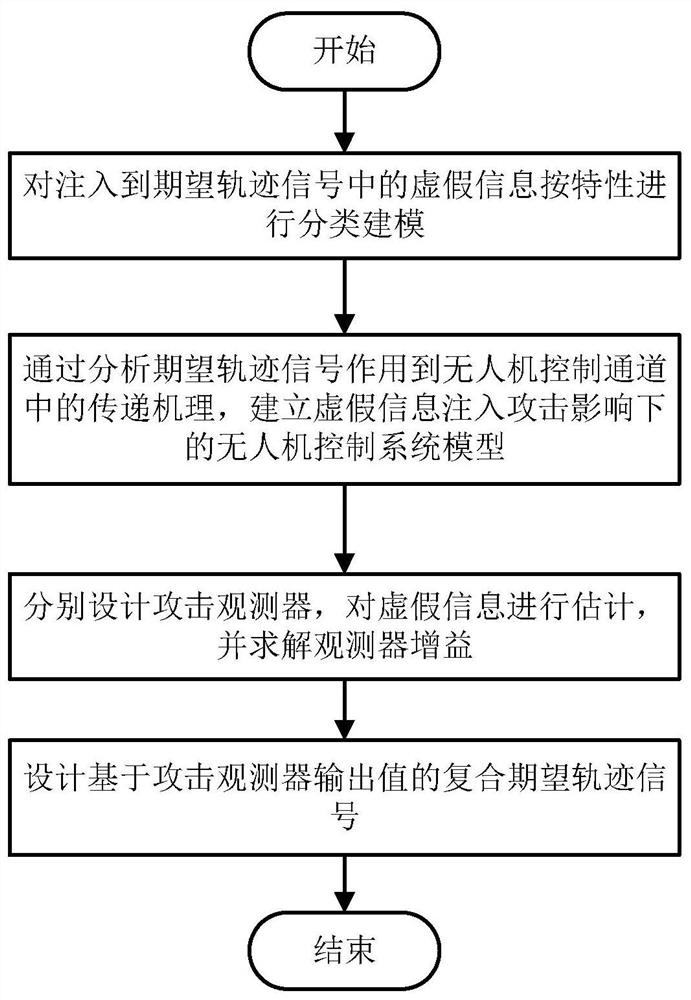
[0045] Such as figure 1 As shown, the design steps of a UAV safety control method under the attack of the desired trajectory signal according to the present invention are as follows: first, classify and model the false information injected into the desired trajectory signal according to characteristics; secondly, analyze the expected The transmission mechanism of the trajectory signal acting on the control channel of the UAV is established to estab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More