

Unmanned aerial vehicle height control method based on UDE estimator
A height control, unmanned aerial vehicle technology, applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The embodiments of the present invention will be further described below in conjunction with the drawings.
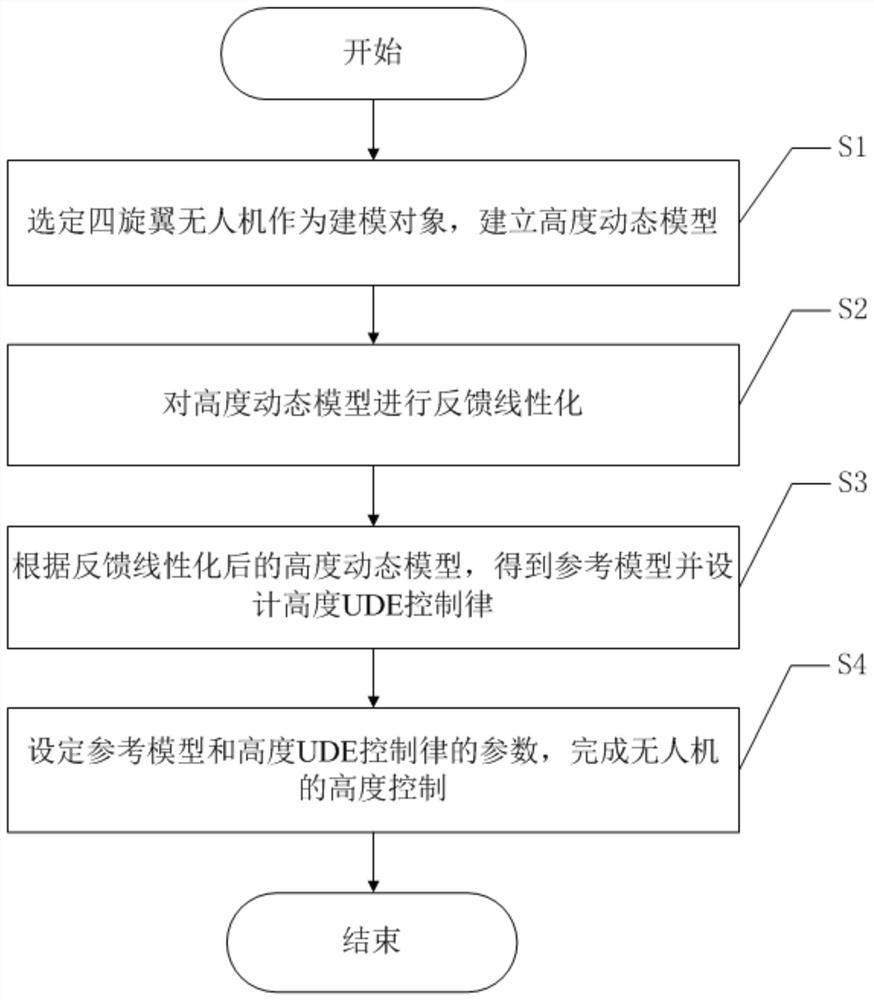
[0046] Such as figure 1 As shown, the present invention provides a UDE estimator-based drone height control method, which includes the following steps:
[0047] S1: Select a quadrotor UAV as the modeling object and establish a highly dynamic model;
[0048] S2: Feedback linearization of highly dynamic models;
[0049] S3: According to the highly dynamic model after feedback linearization, obtain the reference model and design the highly UDE control law;
[0050] S4: Set the parameters of the reference model and the altitude UDE control law to complete the altitude control of the UAV.
[0051] In the embodiment of the present invention, such as figure 1 As shown, in step S1, the method to establish a highly dynamic model is: calculate the vertical acceleration of the quadrotor UAV The calculation formula is:
[0052]
[0053] Where u 4 Represents the combined force generated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More