

Unmanned ship path tracking control method based on internal model control and genetic algorithm
A genetic algorithm and path tracking technology, applied in the field of unmanned ship path tracking control based on internal model control and genetic algorithm, can solve problems such as poor timeliness, unfavorable control effect, unfavorable engineering application, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The following describes the embodiments of the present invention in detail with reference to the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation and specific operation procedures, but the protection scope of the present invention is not limited to the following Mentioned examples.
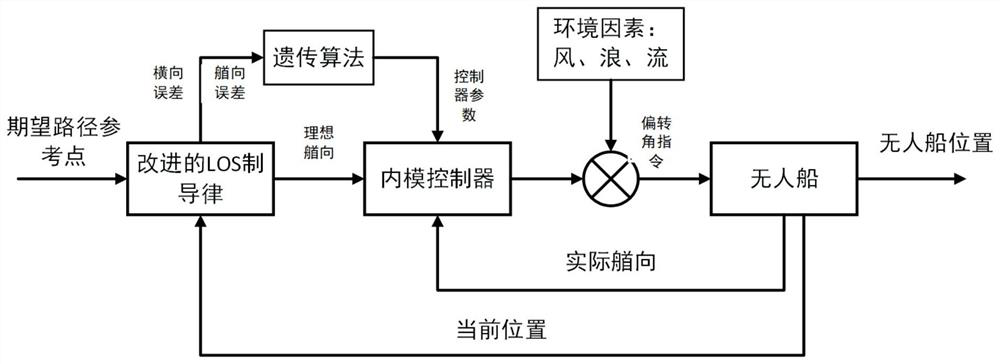
[0090] Such as figure 1 As shown, the unmanned ship first obtains the coordinate point information of the desired path, combined with the current position information of the unmanned ship, outputs the ideal heading angle of the unmanned ship through the improved LOS guidance law, and uses the heading angle as the internal model controller enter. At the same time, genetic algorithm is used to combine the current lateral error and heading error to optimize the parameters of the internal model controller. Finally, the internal model controller outputs the deflection angle of the unmanned...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More