

Visual indoor positioning method and system based on top indication symbol
An indoor positioning and symbol technology, applied to measuring devices, instruments, surveying and mapping and navigation, etc., to achieve the effect of improving accuracy, flexible changes, and less hardware equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0027] In order to clearly illustrate the technical characteristics of the present solution, the present application will be described in detail below through specific implementation modes and in conjunction with the accompanying drawings.
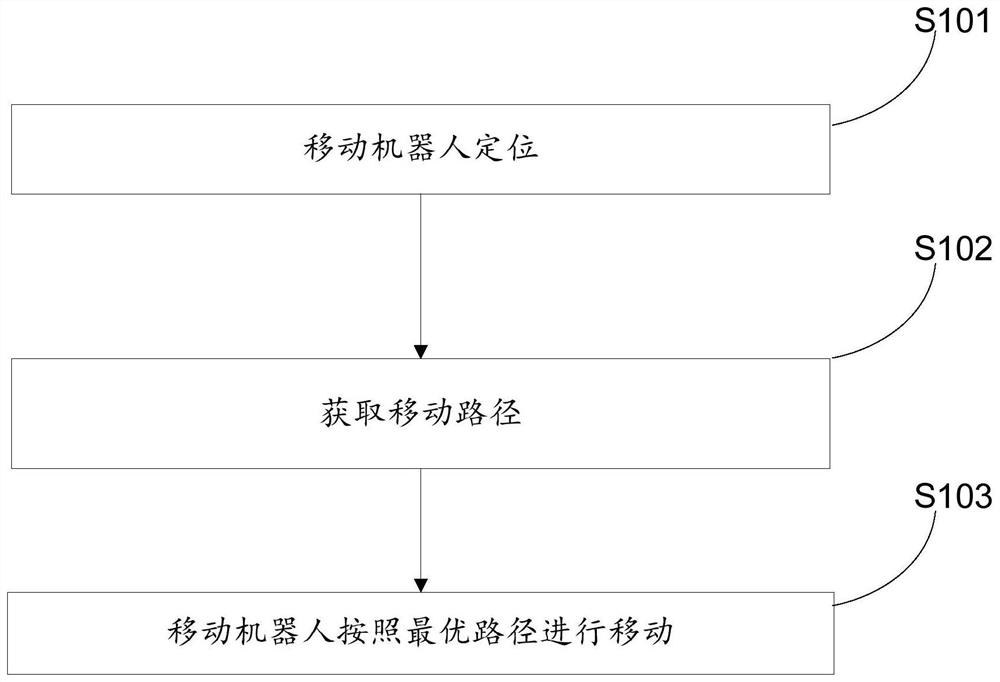
[0028] In the first embodiment, as in figure 1 As shown, proceed as follows:
[0029] S101. Positioning of the mobile robot: enter the specified position through the indicator symbol, adjust the orientation of the mobile robot according to the indicator line, and use the specified point for precise positioning;
[0030] S102. Obtain the moving path: obtain the overall layout through the path calibration system, and then optimize the optimal path through the path optimization system. During the process of optimizing the optimal path, for each steering angle and moving distance, assign values according to the set weights , the path with the lowest weight is the optimal path;
[0031] S103. The mobile robot moves according to the optimal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More