

Adaptive terminal dynamic sliding mode control method based on active disturbance rejection
An adaptive terminal and control method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as chattering, difficulty in obtaining model information of the controlled object, and inability to reach the equilibrium point in a limited time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only for illustration and are not intended to limit the present invention.
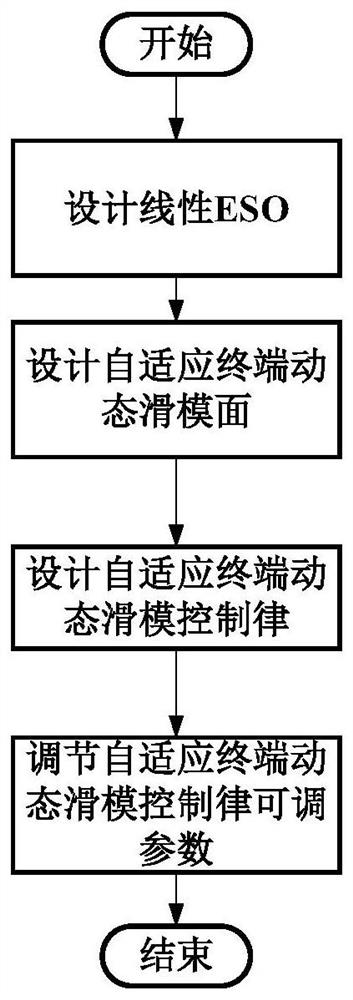
[0043] The present invention provides an adaptive terminal dynamic sliding mode control method based on active disturbance rejection, such as figure 1 shown, including the following steps:
[0044] S1: For second-order controlled objects Design a third-order extended state observer, and use the third-order extended state observer to estimate the total disturbance of the second-order controlled object; where, b represents the control coefficient, f represents the total disturbance of the second-order controlled object, and u represents the total disturbance applied to the second-order controlled object. The control signal of the first-order controlled...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More