

Global automatic driving method and system and vehicle-mounted terminal
A technology for autonomous driving and in-vehicle terminals, applied in the field of transportation, can solve the problems of unguaranteed safety, high requirements, and inability to realize automatic driving, and achieve the effect of reducing computing burden and ensuring safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] This embodiment discloses a centrally controlled automatic driving method, which includes a step of implementing a 3D dynamic model of the city and a step of controlling automatic driving, and the two steps are parallel. The step of realizing the city 3D dynamic model is mainly to maintain the city 3D dynamic model, and the step of automatic driving control is to realize the automatic driving control. The two steps are described in detail below.
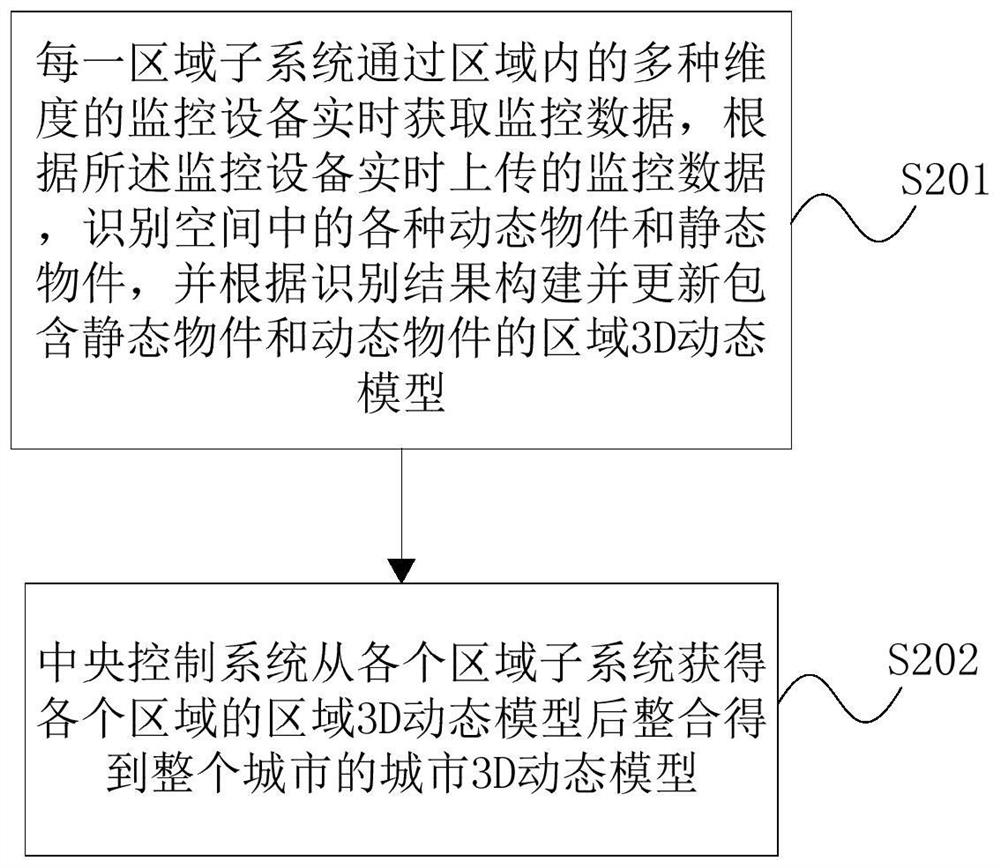
[0036] 1) Realization steps of urban 3D dynamic model, refer to figure 2 , specifically including the following steps S201 and S202:
[0037] S201: Each regional subsystem acquires monitoring data in real time through multiple dimensions of monitoring equipment in the area, and identifies various dynamic objects and static objects in the space according to the monitoring data uploaded by the monitoring equipment in real time, and constructs a system based on the recognition results. And update the 3D dynamic model of the ar...
Embodiment 2
[0059] This embodiment discloses a vehicle-mounted terminal, including a processor and a memory, the memory stores a computer program, and the computer program implements the following steps when executed by the processor:
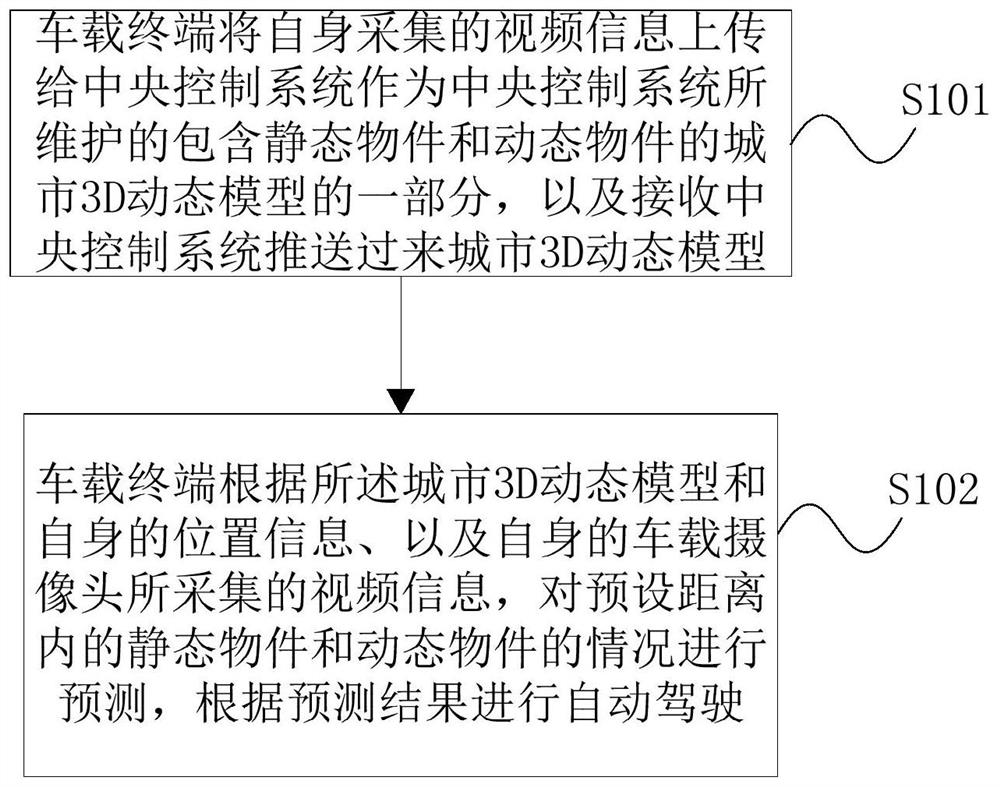
[0060] Receive the city 3D dynamic model including static objects and dynamic objects pushed by the central control system;
[0061] According to the 3D dynamic model of the city and its own location information, as well as the video information collected by its own vehicle camera, it predicts the situation of static objects and dynamic objects within a preset distance, and performs automatic driving according to the prediction results.
[0062] For more content, please refer to the content of the vehicle-mounted terminal part of the embodiment, which will not be repeated here.
Embodiment 3
[0064] This embodiment discloses a global automatic driving system, including:
[0065] Such as the vehicle-mounted terminal of Embodiment 2;
[0066] Multiple regional subsystems, each regional subsystem is used to obtain monitoring data in real time through multiple dimensions of monitoring equipment in the area, and identify various dynamic objects and static objects in the space according to the monitoring data uploaded by the monitoring equipment in real time , and construct and update the regional 3D dynamic model including static objects and dynamic objects according to the recognition results;
[0067] A central control system, the plurality of regional subsystems are respectively connected to the central control system, and the central control system is used to obtain the regional 3D dynamic models of each region from each regional subsystem and integrate them to obtain the urban 3D dynamic model of the entire city , and push the 3D dynamic model of the city to each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More