

Breadth-first search algorithm for sweeping robot to search unswept area
A sweeping robot, width-first technology, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the problems of sweeping robots not covering cleaning, etc., to achieve the effect of improving coverage efficiency, avoiding storage, and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, preferred embodiments are given to further describe the present invention in detail. However, it should be noted that many of the details listed in the specification are only for readers to have a thorough understanding of one or more aspects of the present invention, and these aspects of the present invention can be implemented even without these specific details.
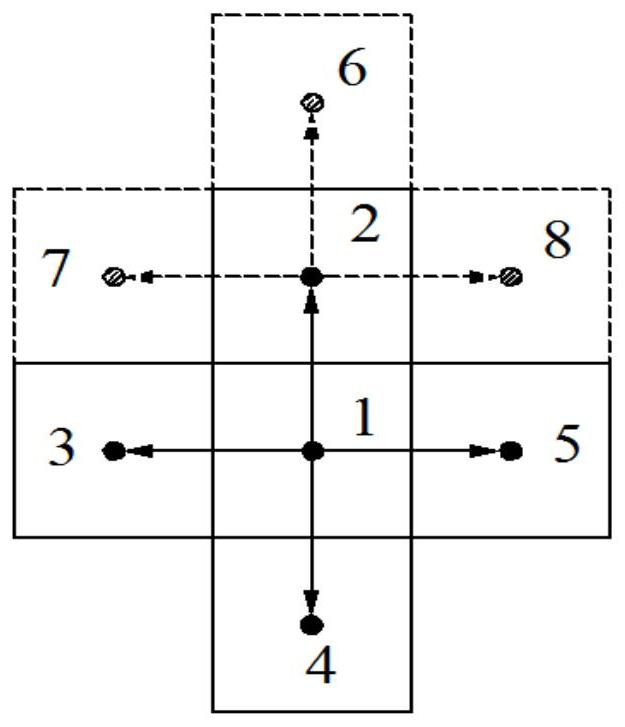
[0040] A breadth-first search algorithm for sweeping robots to find unswept areas, which can be applied to mid-range sweeping robots based on inertial navigation. like figure 1 As shown, the specific steps are as follows:
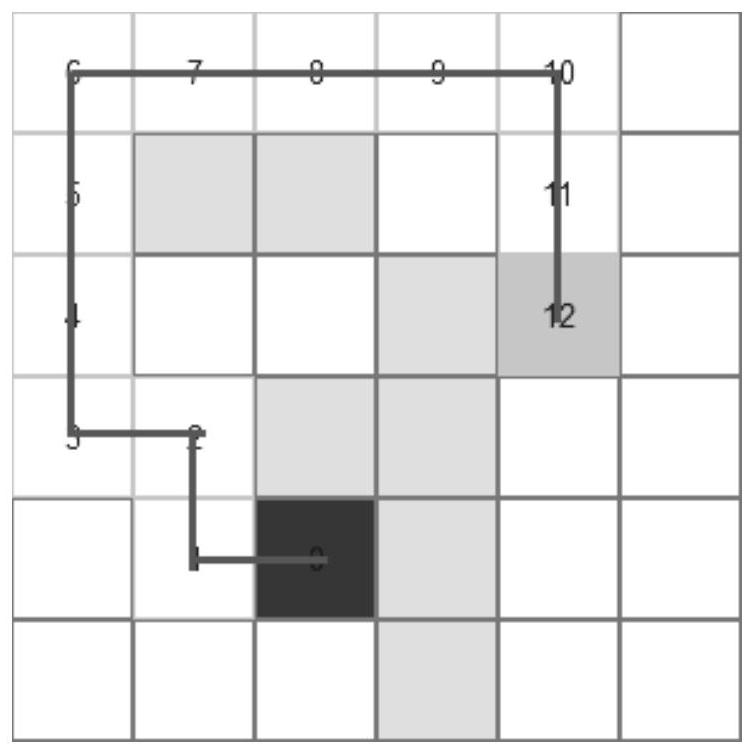
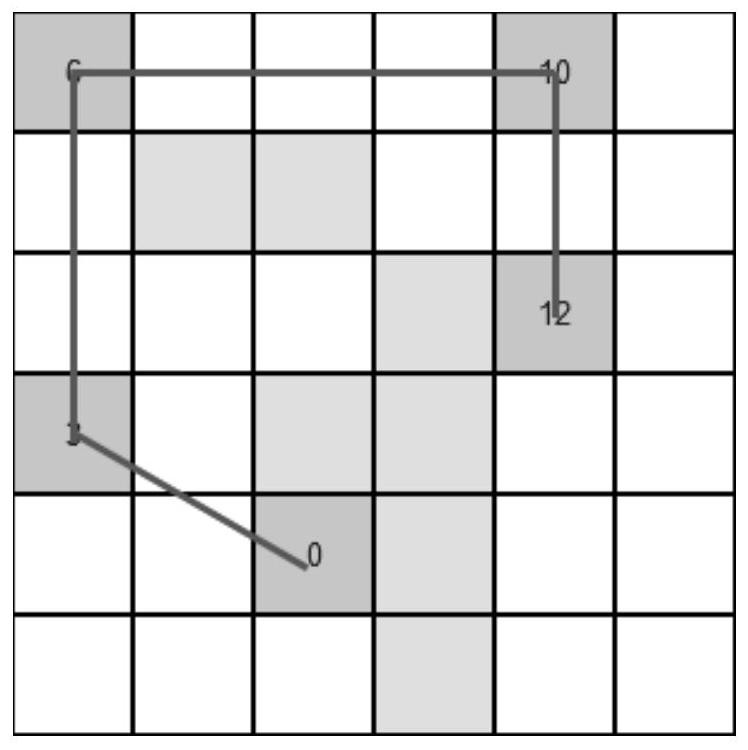
[0041] 1. When the area around the robot is cleaned, or when the robot accidentally collides with an obstacle, the algorithm will be invoked to search for the nearest uncleaned point in the world, obtain the passed grid map according to the linked list, and convert it into an action list out...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More