

Compensation algorithm for three-dimensional space measurement result data
A measurement result, three-dimensional space technology, applied in image data processing, calculation, instruments, etc., can solve the problems of limited understanding, long drawing cycle, insufficient data objectivity, etc., and achieve the effect of reducing manual compensation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
[0035] As shown in Figures 1-6, according to the compensation algorithm for three-dimensional space measurement result data described in the embodiment of the present invention, the algorithm includes the following steps:
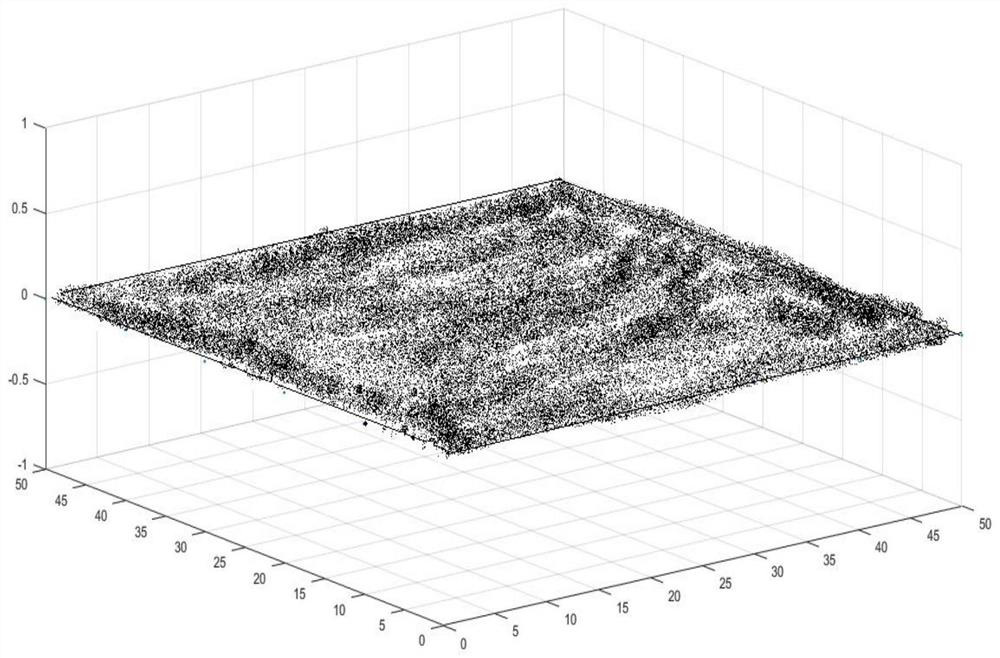
[0036] Step 1, acquisition of point cloud data;
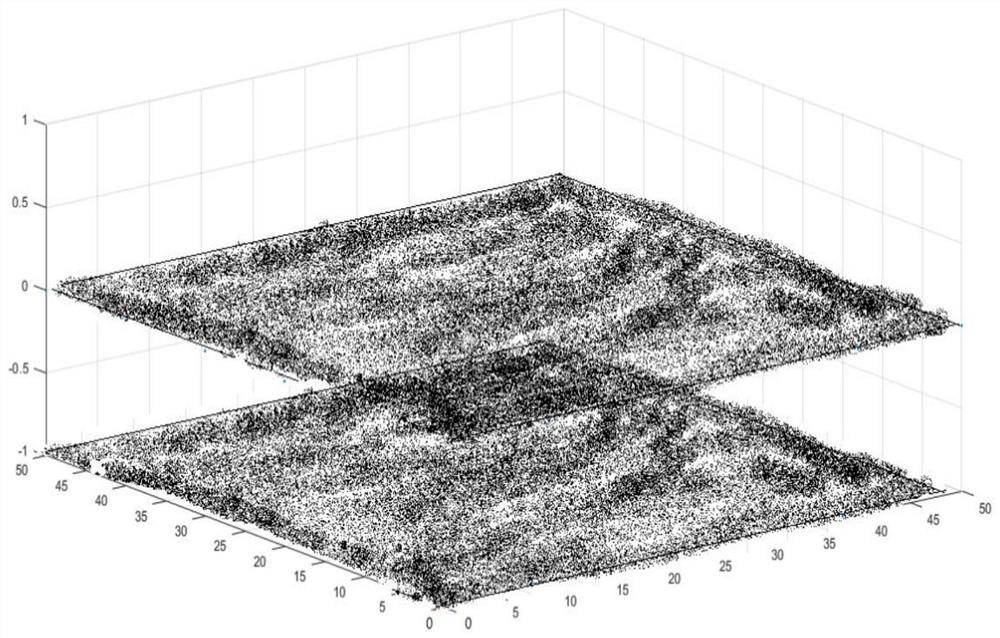
[0037] Step 2, compensate the point cloud of the bottom surface of the object;
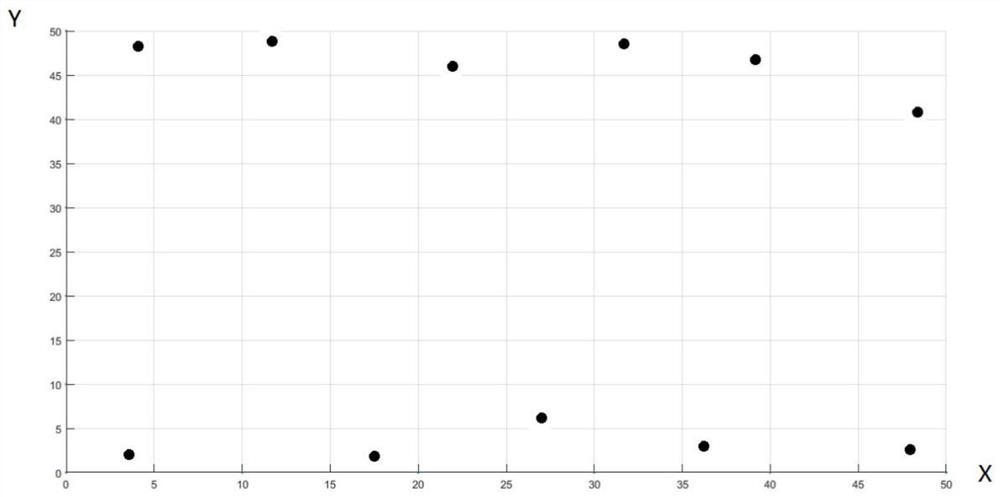
[0038] Step 3, compensate the point cloud around the object;
[0039] In a specific embodiment of the present invention, in the step of obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More