

Self-adaptive rigid gripper
A self-adaptive and rigid technology, applied in the field of robotics, can solve the problems of the gripper being difficult to adapt to different shapes, difficult to find suitable contact points, complicated control processes, etc., to reduce maintenance costs, low costs, and prolong life. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with accompanying drawing and specific embodiment:
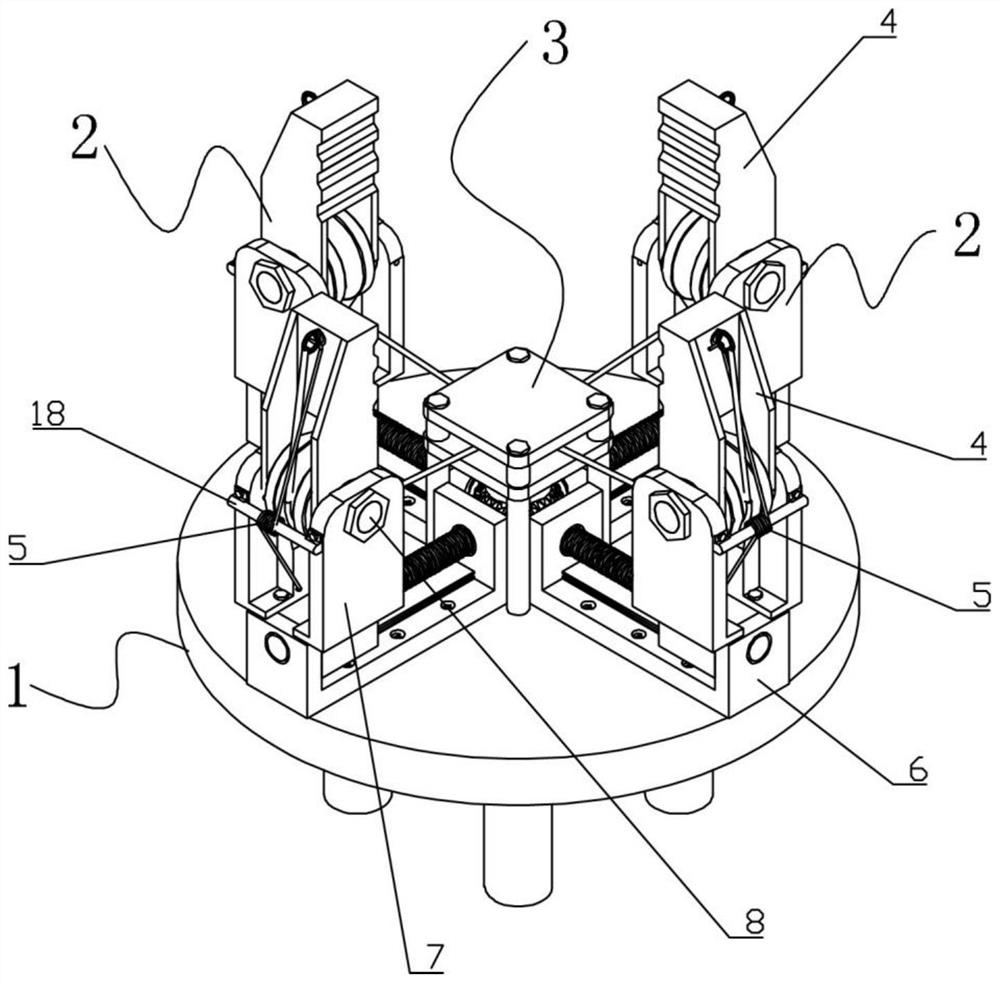
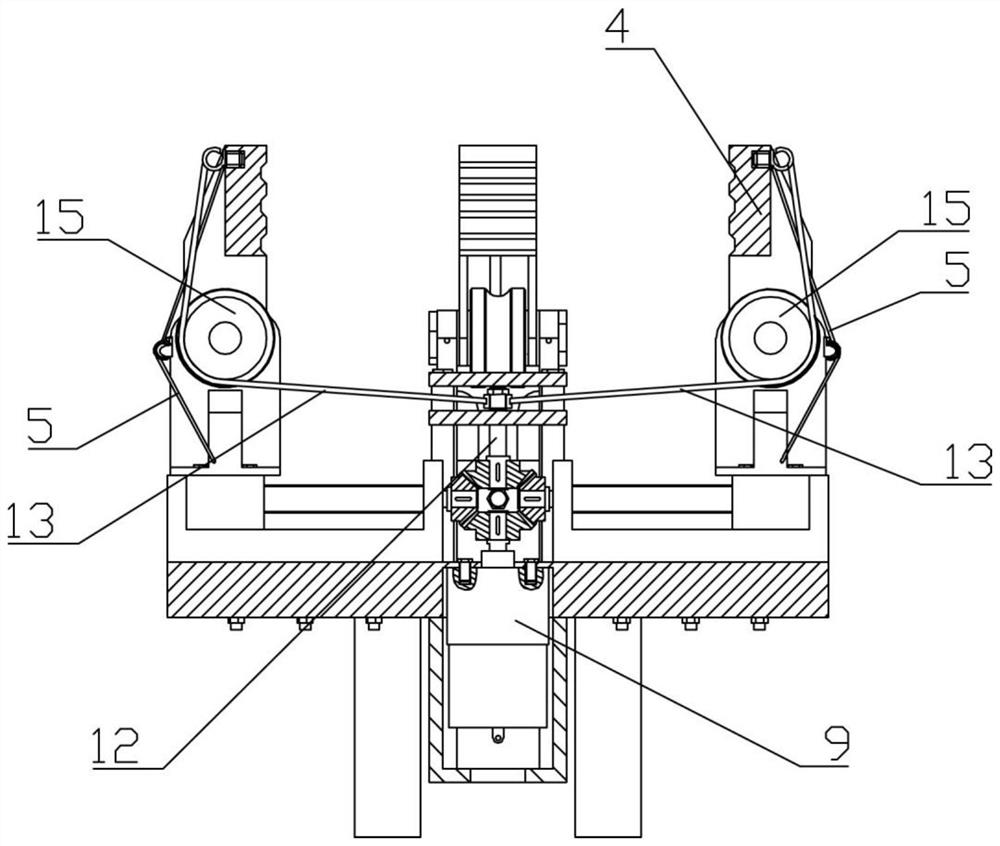
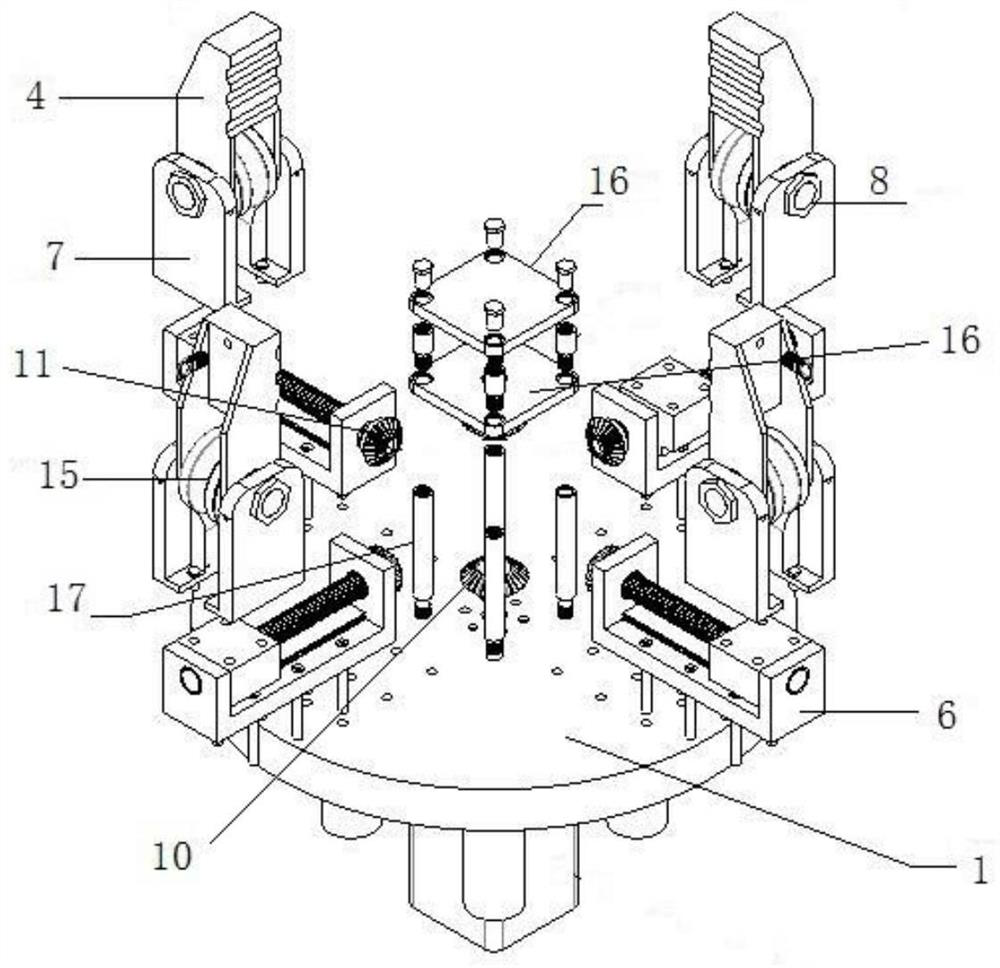
[0032] Such as Figure 1-Figure 7 As shown, an adaptive rigid gripper of the present invention includes a base 1 and a clamping portion arranged on the base 1; the clamping portion includes four clamping modules 2 distributed in a cross shape and used to drive four A driving module 3 that moves synchronously with two clamping modules 2, and the driving module 3 is located at the enclosing center of the four clamping modules 2; wherein, the clamping module 2 includes a transmission unit, a jaw 4 arranged on the transmission unit, and a connection The torsion spring 5 between the transmission unit and the clamp jaw 4, the transmission unit is arranged on the base 1; the clamp jaw 4 and the transmission unit are located in the same vertical plane, and one end of the clamp jaw 4 is rotationally connected with the transmission unit; the torsion spring ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More