

Variable-rigidity soft finger and control method thereof
A finger and stiffness technology, applied in the field of soft robots, can solve problems such as inability to actively change stiffness, safety and flexibility limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
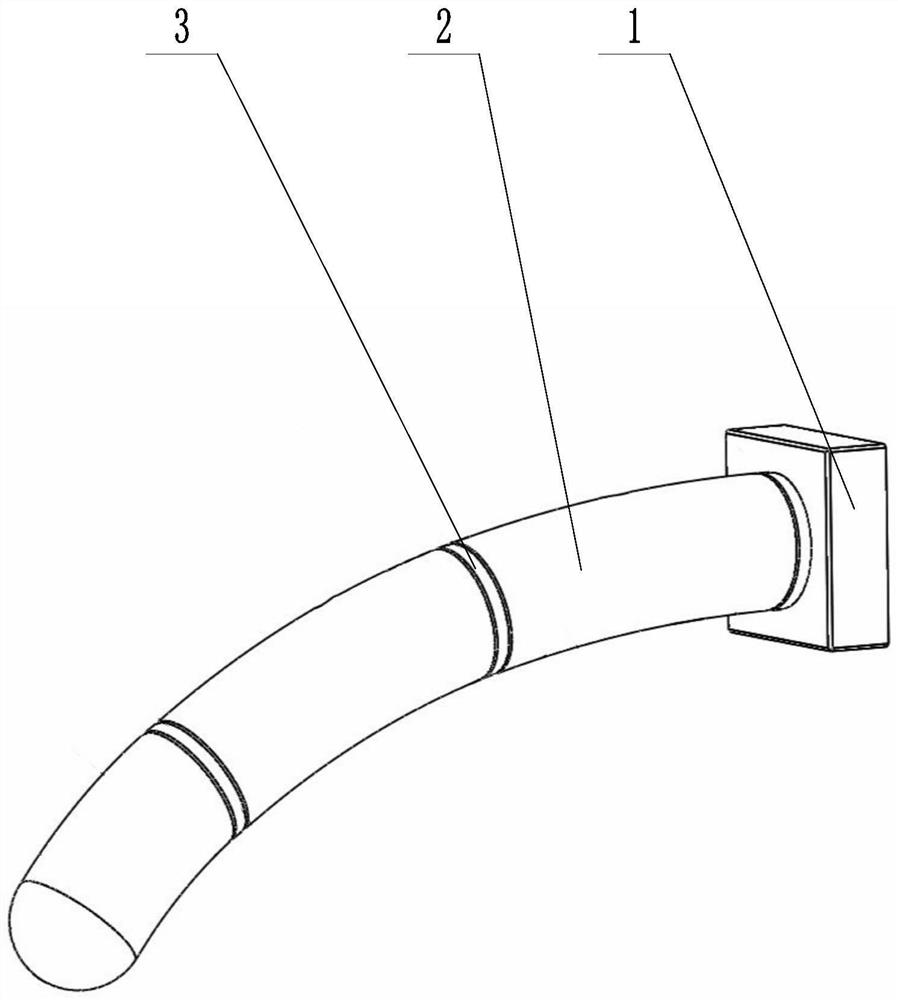
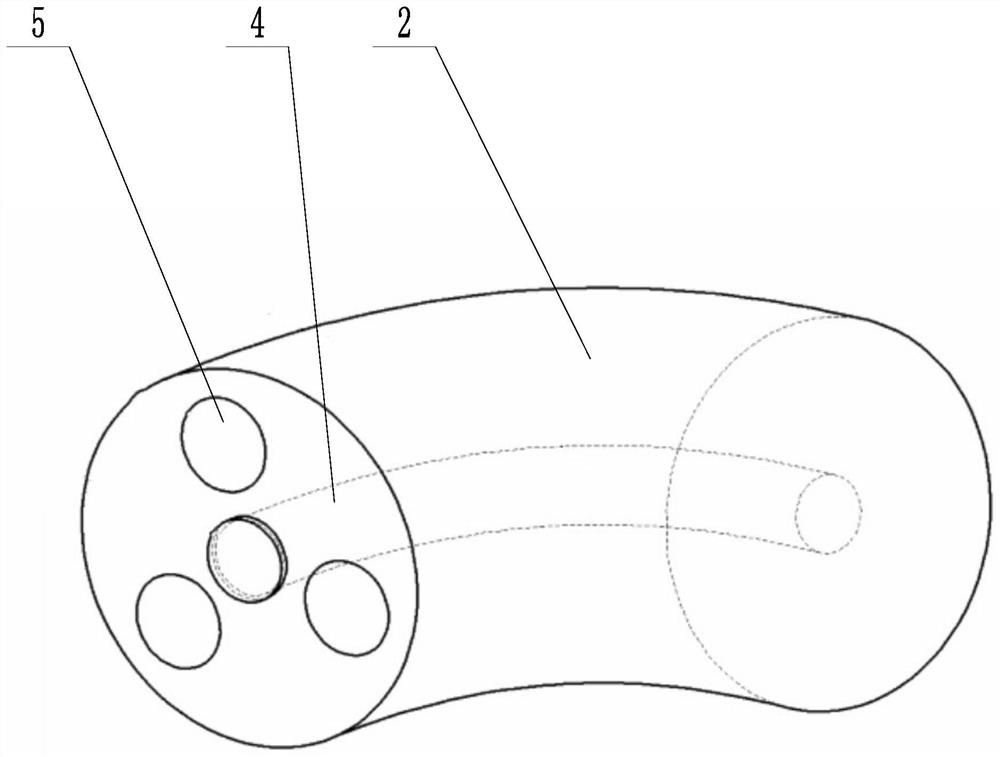
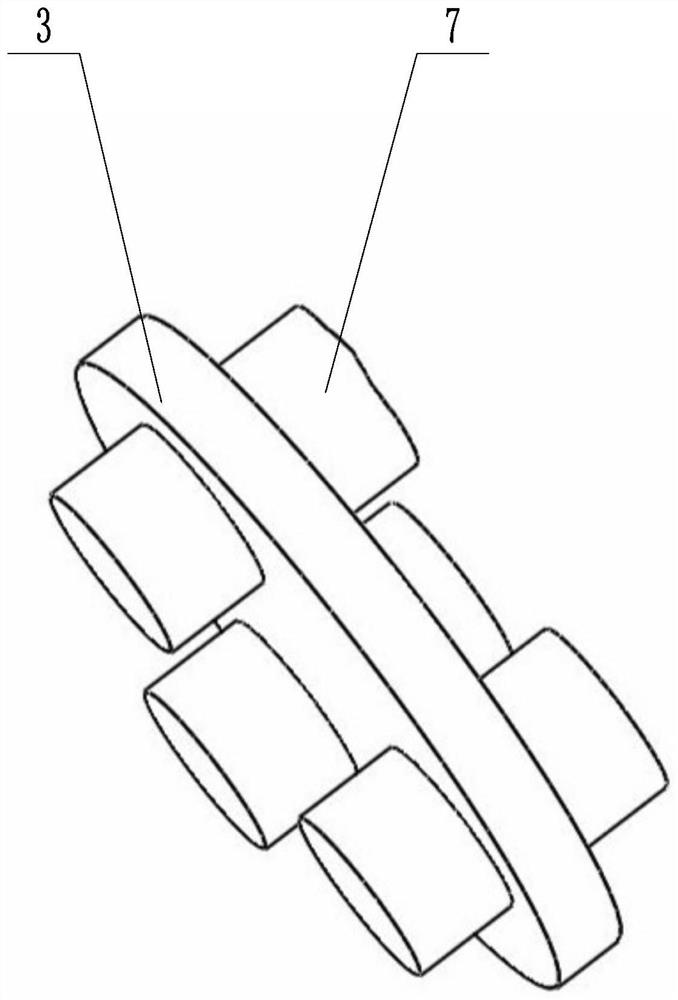
[0033] A soft finger with variable stiffness, such as Figures 1 to 3 As shown, the finger is installed on the base 1, and the base 1 is provided with an air guide hole corresponding to the air channel 5, and the air channel 5 is inserted into the air guide hole. Several bases 1 are connected together to form a mechanical artificial hand. The base 1 corresponds to the position of the palm of a person. High-pressure gas pre-distributed for action is stored on the base 1 . The finger includes a finger section 2 and a knuckle 3. A magneto-rheological fluid channel 4 is arranged in the finger section 2 along the axial direction. The number is three, and the gas pipelines 5 surround the magnetorheological fluid channel 4 at equal intervals. When designing a non-simulation manipulator, several soft fingers can be set to form an array, and adjacent fingers can cooperate. The fingers can be bent in three directions. By cooperating with adjacent fingers, the clamping and grasping ...
Embodiment 2
[0046] Such as Figure 6 Shown, embodiment 2 also has the following features on the basis of embodiment 1:
[0047] A spiral electric wire 9 is connected between adjacent electrodes, the spiral electric wire 9 is arranged around the magnetic flow hose, and the spiral electric wire 9 is flexible. The spiral electric wire 9 is embedded on the finger segment 2, and the finger segment 2 is provided with a channel corresponding to the spiral electric wire 9.
[0048] Due to the difference in the amount of gas charged between the various air pipelines 5, the degree of bending of the fingers is also not certain. The magnetic field between the two electrodes must be the strongest when the two are connected in a straight line, and the corresponding finger stiffness will be higher. Due to the bending of the finger, the magnetic lines of force corresponding to the magnetorheological fluid in the corresponding magnetic fluid hose 6 are relatively weak. In order to avoid this situation,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More