A dynamic balancing method and device for a substation inspection robot
A dynamic balance and robot technology, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of small overshoot range, fast response speed, and improve the efficiency of inspection work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and cannot be used to limit the protection scope of the present invention.
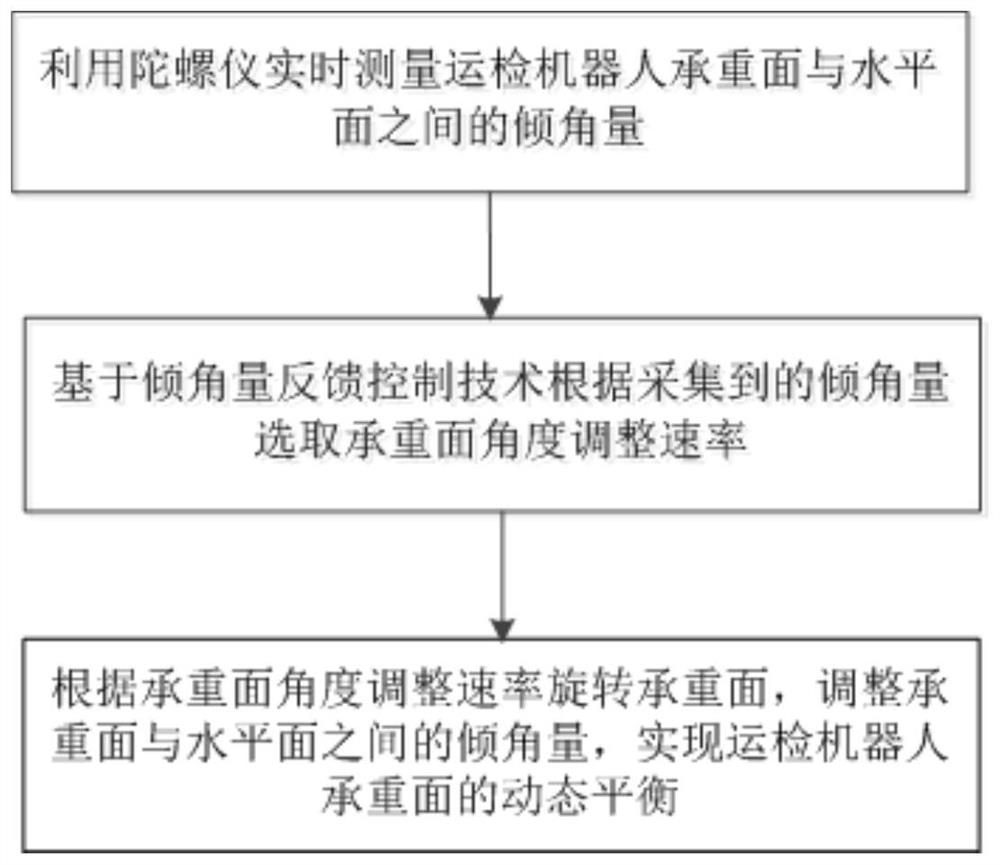
[0040] The embodiment of the present invention provides a dynamic balancing method for a substation inspection robot, such as figure 1 shown, including the following steps:
[0041] Step A: Use the gyroscope to measure the inclination angle between the load-bearing surface and the horizontal surface of the inspection robot in real time. The load-bearing surface refers to the plane used to place and transport the test instrument on the inspection robot. Under normal circumstances, the load-bearing surface is parallel to the horizontal plane.
[0042] The specific operation of measuring the inclination is as follows:
[0043] When the substation inspection robot enters the motion st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com