

A spin target capture method using a space dual-arm robot
A space robot and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of noise, unstable control system, and difficulty in realization, so as to achieve fast derotation speed, reduce adverse effects, and improve reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] see figure 1 — Figure 5 , the technical scheme adopted in the present invention comprises the following steps:
[0073] 1) According to the design of the grabber, establish the system dynamics model of the dual-arm space robot and the target;
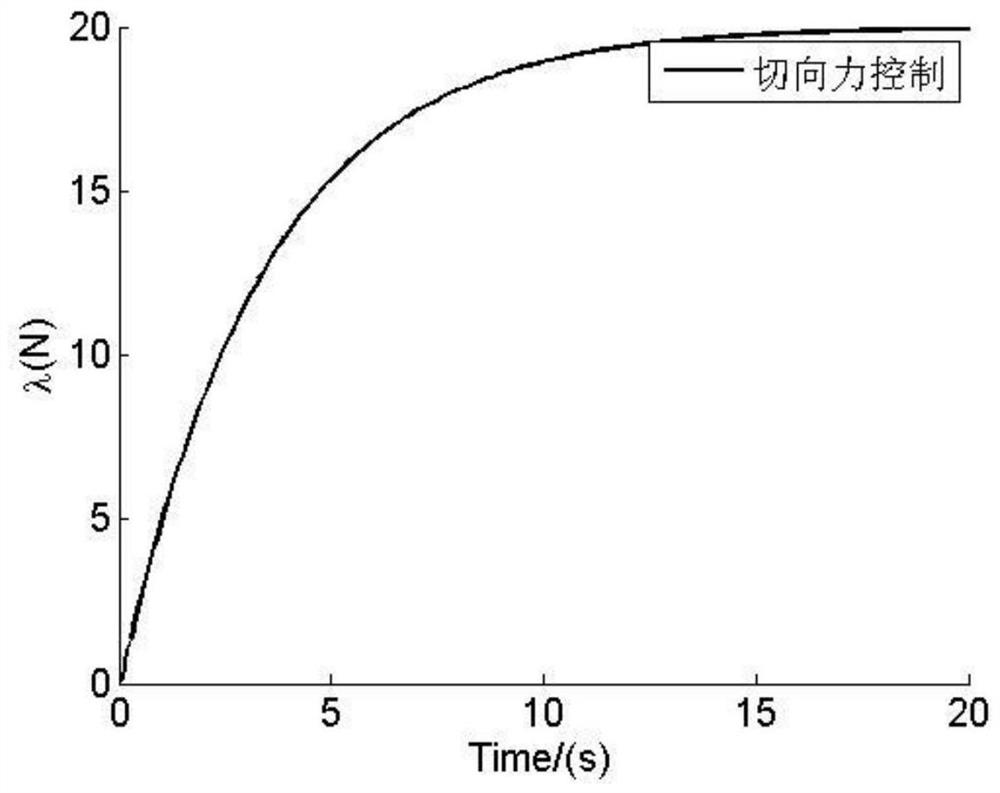
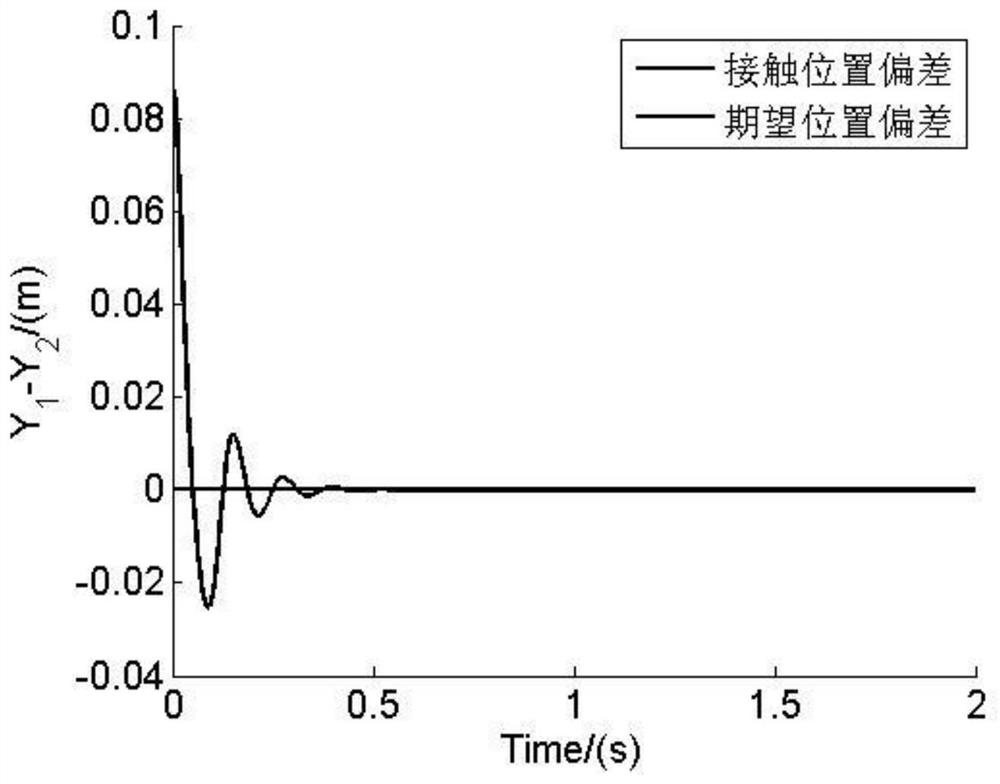
[0074] 2) Design a compliance control method to achieve the synchronous racemization and capture of the target;
[0075] In the step 1), the specific steps of establishing the system dynamics model of the dual-arm space robot and the target are as follows:
[0076] 1-1): Constraint Analysis
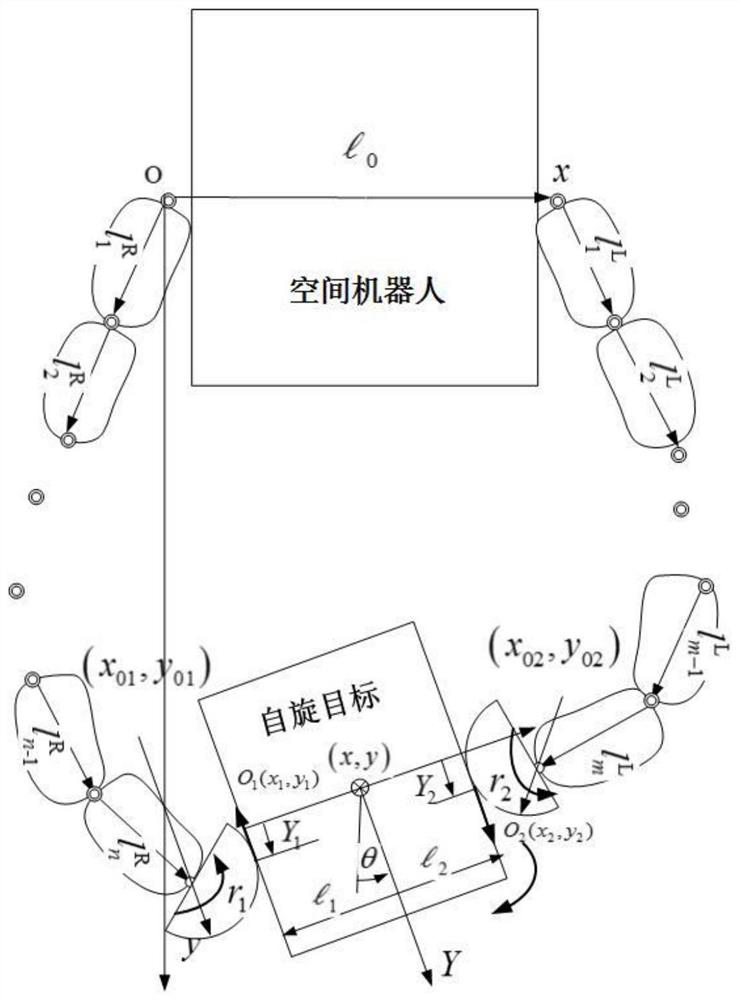
[0077] In order to establish a dynamic model under constraints, the tangential and normal position constraints between the spherical catcher and the target need to be analyzed first. The constraints are as follows figure 1 shown. Define the first joint point O of the right arm of the space robot as the origin of the reference coordinate system. The position of the target center of mass is (x, y) in the space robot body coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More